+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+|
+ Algorithms_in_C
+ 1.0.0
+
+ Set of algorithms implemented in C.
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+observation Struct Reference
+
+
+
The documentation for this struct was generated from the following file:
++Data Fields | |
| +double | x |
| abscissa of 2D data point | |
| +double | y |
| ordinate of 2D data point | |
| +int | group |
| the group no in which this observation would go | |
Detailed Description
+a class to store points in 2d plane the name observation is used to denote a random point in plane
+The documentation for this struct was generated from the following file:
-
+
- machine_learning/k_means_clustering.c +
+
+
+
diff --git a/d1/d5e/structobservation.js b/d1/d5e/structobservation.js
new file mode 100644
index 00000000..5406d772
--- /dev/null
+++ b/d1/d5e/structobservation.js
@@ -0,0 +1,6 @@
+var structobservation =
+[
+ [ "group", "d1/d5e/structobservation.html#a2db8ace685c08aa7b52f5a28b0843aab", null ],
+ [ "x", "d1/d5e/structobservation.html#a04f3dcfd59dd91353395e35c9831fade", null ],
+ [ "y", "d1/d5e/structobservation.html#ab6be1fa7024b2d5f3a30d6c6b70efdd7", null ]
+];
\ No newline at end of file
diff --git a/d1/d99/structcluster.html b/d1/d99/structcluster.html
new file mode 100644
index 00000000..f65838f2
--- /dev/null
+++ b/d1/d99/structcluster.html
@@ -0,0 +1,132 @@
+
+
+
+
+
+
+
+-
+
+
- Generated by
+
+
 1.8.18
+
1.8.18
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+|
+ Algorithms_in_C
+ 1.0.0
+
+ Set of algorithms implemented in C.
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+cluster Struct Reference
+
+
+
The documentation for this struct was generated from the following file:
++Data Fields | |
| +double | x |
| abscissa centroid of this cluster | |
| +double | y |
| ordinate of centroid of this cluster | |
| +size_t | count |
| count of observations present in this cluster | |
Detailed Description
+this class stores the coordinates of centroid of all the points in that cluster it also stores the count of observations belonging to this cluster
+The documentation for this struct was generated from the following file:
-
+
- machine_learning/k_means_clustering.c +
+
+
+
diff --git a/d1/d99/structcluster.js b/d1/d99/structcluster.js
new file mode 100644
index 00000000..c6a4361f
--- /dev/null
+++ b/d1/d99/structcluster.js
@@ -0,0 +1,6 @@
+var structcluster =
+[
+ [ "count", "d1/d99/structcluster.html#aaacf0562ee2d9e8866c66ddaa6527c2b", null ],
+ [ "x", "d1/d99/structcluster.html#a13278ef636c1d9bd9ce8fad736f4c570", null ],
+ [ "y", "d1/d99/structcluster.html#a10fa7010c12d0f03a422d68321495479", null ]
+];
\ No newline at end of file
diff --git a/d2/dc3/carray_8h_source.html b/d2/dc3/carray_8h_source.html
index d59895eb..3daff873 100644
--- a/d2/dc3/carray_8h_source.html
+++ b/d2/dc3/carray_8h_source.html
@@ -183,9 +183,9 @@ $(document).ready(function(){initNavTree('d2/dc3/carray_8h_source.html','../../'
-
+
-
+
+
- Generated by
+
+ 1.8.18
+
char * int_to_string(uint16_t value, char *dest, int base)
Converts an integer value to a null-terminated string using the specified base and stores the result ...
Definition: int_to_string.c:25
void func(int sockfd)
Continuous loop to send and receive over the socket.
Definition: server.c:47
Definition: k_means_clustering.c:38
void test2()
Test that creates a random set of points distributed near the locus of the Lamniscate of Gerono and t...
Definition: kohonen_som_trace.c:358
void forward_euler_step(const double dx, const double *x, double *y, double *dy)
Compute next step approximation using the forward-Euler method.
Definition: ode_forward_euler.c:82
void test3()
Test that creates a random set of points distributed in eight clusters in 3D space and trains an SOM ...
Definition: kohonen_som_topology.c:609
void exact_solution(const double *x, double *y)
Exact solution of the problem.
Definition: ode_midpoint_euler.c:67
int group
the group no in which this observation would go
Definition: k_means_clustering.c:41
int compare(const void *a, const void *b)
comparison function for use with internal qsort algorithm
Definition: sol1.c:19
void propagate(CantorSet *head)
Iterative constructor of all sets in the current level.
Definition: cantor_set.c:23
double vector_mag(double *vector, int L)
Compute magnitude of vector.
Definition: qr_decompose.h:64
void adaline_fit(struct adaline *ada, double **X, const int *y, const int N)
Update the weights of the model using supervised learning for an array of vectors.
Definition: adaline_learning.c:184
void test_circle(double *const *data, int N)
Creates a random set of points distributed near the circumference of a circle and trains an SOM that ...
Definition: kohonen_som_trace.c:223
double forward_euler(double dx, double x0, double x_max, double *y, char save_to_file)
Compute approximation using the forward-Euler method in the given limits.
Definition: ode_forward_euler.c:99
void test_3d_classes2(double *const *data, int N)
Creates a random set of points distributed in four clusters in 3D space with centroids at the points.
Definition: kohonen_som_topology.c:564
void qr_decompose(double **A, double **Q, double **R, int M, int N)
Decompose matrix using Gram-Schmidt process.
Definition: qr_decompose.h:142
const char * complex_str(long double complex x)
create a textual form of complex number
Definition: durand_kerner_roots.c:66
node * newNode(int data)
The node constructor, which receives the key value input and returns a node pointer.
Definition: binary_search_tree.c:28
large_num * new_number(void)
create a new large number
Definition: factorial_large_number.c:24
Definition: k_means_clustering.c:51
char check_termination(long double delta)
check for termination condition
Definition: durand_kerner_roots.c:83
double semi_implicit_euler(double dx, double x0, double x_max, double *y, char save_to_file)
Compute approximation using the semi-implicit-Euler method in the given limits.
Definition: ode_semi_implicit_euler.c:109
bool isPalindrome(int number)
Check given number whether is palindrome number or not.
Definition: palindrome.c:29
void multiply(large_num *num, unsigned long n)
multiply large number with another integer and store the result in the same large number
Definition: factorial_large_number.c:66
void kohonen_update_weights(double const *x, double *const *W, double *D, int num_out, int num_features, double alpha, int R)
Update weights of the SOM using Kohonen algorithm.
Definition: kohonen_som_trace.c:129
void test_lamniscate(double *const *data, int N)
Creates a random set of points distributed near the locus of the Lamniscate of Gerono.
Definition: kohonen_som_trace.c:319
unsigned long lcm(unsigned long a, unsigned long b)
Compute Least Common Multiple (LCM) of two numbers.
Definition: sol.c:31
bool get_next_unknown(const struct sudoku *a, int *x, int *y)
Find and get the location for next empty cell.
Definition: sudoku_solver.c:144
size_t count
count of observations present in this cluster
Definition: k_means_clustering.c:54
void spirograph(double *x, double *y, double l, double k, size_t N, double rot)
Generate spirograph curve into arrays x and y such that the i^th point in 2D is represented by (x[i],...
Definition: spirograph.c:57
void midpoint_euler_step(double dx, double *x, double *y, double *dy)
Compute next step approximation using the midpoint-Euler method.
Definition: ode_midpoint_euler.c:83
bool OKcol(const struct sudoku *a, int x, int y, int v)
Check if y^th column is valid.
Definition: sudoku_solver.c:67
void delete_adaline(struct adaline *ada)
delete dynamically allocated memory
Definition: adaline_learning.c:89
void kohonen_som_tracer(double **X, double *const *W, int num_samples, int num_features, int num_out, double alpha_min)
Apply incremental algorithm with updating neighborhood and learning rates on all samples in the given...
Definition: kohonen_som_trace.c:179
void test2()
Test that creates a random set of points distributed in 4 clusters in 3D space and trains an SOM that...
Definition: kohonen_som_topology.c:506
void problem(const double *x, double *y, double *dy)
Problem statement for a system with first-order differential equations.
Definition: ode_forward_euler.c:55
void test1()
Test that creates a random set of points distributed in four clusters in 2D space and trains an SOM t...
Definition: kohonen_som_topology.c:406
char * digits
array to store individual digits
Definition: factorial_large_number.c:16
char * adaline_get_weights_str(const struct adaline *ada)
Operator to print the weights of the model.
Definition: adaline_learning.c:112
double * kohonen_data_3d(const struct kohonen_array_3d *arr, int x, int y, int z)
Function that returns the pointer to (x, y, z) ^th location in the linear 3D array given by:
Definition: kohonen_som_topology.c:67
node * newNode(int data)
The node constructor, which receives the key value input and returns a node pointer.
Definition: binary_search_tree.c:28
Definition: bfs.c:6
Definition: graph.c:9
Definition: hash_set.h:7
void display(double **A, int N)
Function to display square matrix.
Definition: lu_decompose.c:66
Definition: stack.c:16
Definition: stack.c:10
◆ test()
+ +
+
diff --git a/d8/d30/decimal__to__binary__recursion_8c.js b/d8/d30/decimal__to__binary__recursion_8c.js
index 789d9f78..e6e301ad 100644
--- a/d8/d30/decimal__to__binary__recursion_8c.js
+++ b/d8/d30/decimal__to__binary__recursion_8c.js
@@ -2,5 +2,5 @@ var decimal__to__binary__recursion_8c =
[
[ "decimal_to_binary", "d8/d30/decimal__to__binary__recursion_8c.html#acbbe6358ec95b3201865a72b2ac522c8", null ],
[ "main", "d8/d30/decimal__to__binary__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4", null ],
- [ "test", "d8/d30/decimal__to__binary__recursion_8c.html#ae1a3968e7947464bee7714f6d43b7002", null ]
+ [ "test", "d8/d30/decimal__to__binary__recursion_8c.html#ad69dd4607977cae05ebe19d1ae604fb1", null ]
];
\ No newline at end of file
diff --git a/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.map b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.map
new file mode 100644
index 00000000..27267a9e
--- /dev/null
+++ b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.map
@@ -0,0 +1,4 @@
+
diff --git a/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.md5 b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.md5
new file mode 100644
index 00000000..f01581df
--- /dev/null
+++ b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.md5
@@ -0,0 +1 @@
+8686ecc64913d16356b3fbc23f30c653
\ No newline at end of file
diff --git a/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.svg b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.svg
new file mode 100644
index 00000000..d27a43d1
--- /dev/null
+++ b/d8/d30/decimal__to__binary__recursion_8c_ad69dd4607977cae05ebe19d1ae604fb1_cgraph.svg
@@ -0,0 +1,37 @@
+
+
+
+
+
diff --git a/d8/d38/queue_8h_source.html b/d8/d38/queue_8h_source.html
index 1c51ecb4..51bc9778 100644
--- a/d8/d38/queue_8h_source.html
+++ b/d8/d38/queue_8h_source.html
@@ -132,7 +132,7 @@ $(document).ready(function(){initNavTree('d8/d38/queue_8h_source.html','../../')
+
+
+
| test | +( | +) | ++ |
+
+
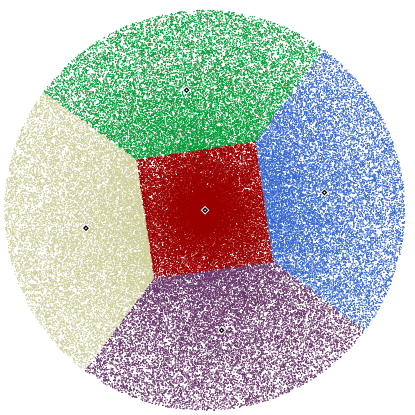
Test function.
+A function to test the kMeans function Generates 100000 points in a circle of radius 20.0 with center at (0,0) and cluster them into 5 clusters
+
+
+
+
+
+
+
+
+
+
+
+
+Here is the call graph for this function:
+
+
+
+
+Definition: bfs.c:6
Definition: queue.c:14
int find(node *root, int data)
Search procedure, which looks for the input key in the tree and returns 1 if it's present or 0 if it'...
Definition: binary_search_tree.c:152
Definition: kruskal.c:41
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+|
+ Algorithms_in_C
+ 1.0.0
+
+ Set of algorithms implemented in C.
+ |
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+K-Means Clustering Algorithm
+
+
+
+
+
+
+Collaboration diagram for K-Means Clustering Algorithm:
+
+
+
+
++Data Structures | |
| struct | observation |
| struct | cluster |
+Typedefs | |
| +typedef struct observation | observation |
| +typedef struct cluster | cluster |
+Functions | |
| +int | calculateNearst (observation *o, cluster clusters[], int k) |
| +void | calculateCentroid (observation observations[], size_t size, cluster *centroid) |
| +cluster * | kMeans (observation observations[], size_t size, int k) |
Detailed Description
+
+
+
+
diff --git a/d8/d71/group__k__means.js b/d8/d71/group__k__means.js
new file mode 100644
index 00000000..7e64bbe0
--- /dev/null
+++ b/d8/d71/group__k__means.js
@@ -0,0 +1,13 @@
+var group__k__means =
+[
+ [ "observation", "d1/d5e/structobservation.html", [
+ [ "group", "d1/d5e/structobservation.html#a2db8ace685c08aa7b52f5a28b0843aab", null ],
+ [ "x", "d1/d5e/structobservation.html#a04f3dcfd59dd91353395e35c9831fade", null ],
+ [ "y", "d1/d5e/structobservation.html#ab6be1fa7024b2d5f3a30d6c6b70efdd7", null ]
+ ] ],
+ [ "cluster", "d1/d99/structcluster.html", [
+ [ "count", "d1/d99/structcluster.html#aaacf0562ee2d9e8866c66ddaa6527c2b", null ],
+ [ "x", "d1/d99/structcluster.html#a13278ef636c1d9bd9ce8fad736f4c570", null ],
+ [ "y", "d1/d99/structcluster.html#a10fa7010c12d0f03a422d68321495479", null ]
+ ] ]
+];
\ No newline at end of file
diff --git a/d8/d71/group__k__means.map b/d8/d71/group__k__means.map
new file mode 100644
index 00000000..6b9018c1
--- /dev/null
+++ b/d8/d71/group__k__means.map
@@ -0,0 +1,4 @@
+
diff --git a/d8/d71/group__k__means.md5 b/d8/d71/group__k__means.md5
new file mode 100644
index 00000000..4a466355
--- /dev/null
+++ b/d8/d71/group__k__means.md5
@@ -0,0 +1 @@
+2cef60f14f7686e8fe63ff84ad6685cd
\ No newline at end of file
diff --git a/d8/d71/group__k__means.svg b/d8/d71/group__k__means.svg
new file mode 100644
index 00000000..634af47d
--- /dev/null
+++ b/d8/d71/group__k__means.svg
@@ -0,0 +1,38 @@
+
+
+
+
+
diff --git a/d8/d7c/dict_8h_source.html b/d8/d7c/dict_8h_source.html
index 815ed1a7..f30dd1dc 100644
--- a/d8/d7c/dict_8h_source.html
+++ b/d8/d7c/dict_8h_source.html
@@ -173,7 +173,7 @@ $(document).ready(function(){initNavTree('d8/d7c/dict_8h_source.html','../../');
-
+
- Generated by
+
+ 1.8.18
+
Definition: dict.h:18
void postorder_display(node *curr)
performs postorder traversal param[in] curr node pointer to the topmost node of the tree
Definition: threaded_binary_trees.c:143
void search(node *root, int ele)
searches for the element
Definition: threaded_binary_trees.c:98
Definition: dict.h:18
Definition: dynamic_array.h:7
◆ main()
+ +
+
@@ -259,6 +336,7 @@ int
+
+
+
| main | +( | +) | ++ |
+
+
Driver code.
+This function calls the test function
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+Here is the call graph for this function:
+
+
+
+
+#define MAX_NAMES
Maximum number of names to store.
Definition: sol1.c:14
char is_in(uint64_t N, uint64_t *D, uint64_t L)
Check if a number is present in given array.
Definition: sol1.c:28
unsigned long get_next_abundant(unsigned long N)
Find the next abundant number after N and not including N.
Definition: sol2.c:70
void test1()
test function to compute eigen values of a 2x2 matrix
Definition: qr_eigen_values.c:224
void bubbleSort(int *arr, int size)
Bubble sort algorithm implements using recursion.
Definition: bubble_sort_recursion.c:29
unsigned long lcm(unsigned long a, unsigned long b)
Compute Least Common Multiple (LCM) of two numbers.
Definition: sol.c:31
Library functions to compute QR decomposition of a given matrix.
uint64_t sigma(uint64_t N)
sum of squares of factors of numbers from 1 thru N
Definition: sol1.c:114
+
@@ -317,6 +395,7 @@ int int main(int argc, char *argv[])
Main function.
Definition: shell_sort2.c:66
+void func(int sockfd)
Continuous loop to send and receive over the socket.
Definition: client.c:37
big_int * add_digit(big_int *digit, char value)
Function that allocates memory to add another digit at the MSB.
Definition: sol1.c:37
int binarysearch2(const int *arr, int l, int r, int x)
Iterative implementation.
Definition: binary_search.c:51
double eigen_values(double **A, double *eigen_vals, int mat_size, char debug_print)
Compute eigen values using iterative shifted QR decomposition algorithm as follows:
Definition: qr_eigen_values.c:106
#define BEAD(i, j)
Create easy access of elements from a 2D matrix stored in memory as a 1D array.
Definition: bead_sort.c:16
void swap(int *first, int *second)
Swapped two numbers using pointer.
Definition: bubble_sort_recursion.c:17
void search(node *root, int ele)
searches for the element
Definition: threaded_binary_trees.c:98
node * insert(node *root, int data)
Insertion procedure, which inserts the input key in a new node in the tree.
Definition: binary_search_tree.c:46
- m -
- main()
-: client.c
+: client.c
, server.c
, udp_server.c
, binary_search_tree.c
diff --git a/globals_func_t.html b/globals_func_t.html
index 3f29646e..7726f68f 100644
--- a/globals_func_t.html
+++ b/globals_func_t.html
@@ -94,7 +94,7 @@ $(document).ready(function(){initNavTree('globals_func_t.html',''); initResizabl
- t -
- test()
-: decimal_to_binary_recursion.c
+: decimal_to_binary_recursion.c
, int_to_string.c
, cartesian_to_polar.c
, bubble_sort_recursion.c
diff --git a/globals_m.html b/globals_m.html
index 6198348d..3a78d7f1 100644
--- a/globals_m.html
+++ b/globals_m.html
@@ -94,7 +94,7 @@ $(document).ready(function(){initNavTree('globals_m.html',''); initResizable();
- m -
- main()
-: client.c
+: client.c
, server.c
, udp_server.c
, binary_search_tree.c
diff --git a/globals_t.html b/globals_t.html
index 2c73b4e5..de6bb580 100644
--- a/globals_t.html
+++ b/globals_t.html
@@ -94,7 +94,7 @@ $(document).ready(function(){initNavTree('globals_t.html',''); initResizable();
- t -
- test()
-: decimal_to_binary_recursion.c
+: decimal_to_binary_recursion.c
, int_to_string.c
, cartesian_to_polar.c
, bubble_sort_recursion.c
diff --git a/modules.html b/modules.html
index 5128d515..12bb5d13 100644
--- a/modules.html
+++ b/modules.html
@@ -99,10 +99,11 @@ $(document).ready(function(){initNavTree('modules.html',''); initResizable(); })
Hash algorithms ▼Machine learning algorithms Adaline learning algorithm Kohonen SOM topology algorithm Kohonen SOM trace/chain algorithm Sudoku solver Sorting algorithms K-Means Clustering Algorithm Kohonen SOM topology algorithm Kohonen SOM trace/chain algorithm Sudoku solver Sorting algorithms + + + + + + + + ++ + diff --git a/search/all_19.js b/search/all_19.js new file mode 100644 index 00000000..e69f2bef --- /dev/null +++ b/search/all_19.js @@ -0,0 +1,4 @@ +var searchData= +[ + ['y_295',['y',['../d1/d5e/structobservation.html#ab6be1fa7024b2d5f3a30d6c6b70efdd7',1,'observation::y()'],['../d1/d99/structcluster.html#a10fa7010c12d0f03a422d68321495479',1,'cluster::y()']]] +]; diff --git a/search/all_3.js b/search/all_3.js index 9ea1c319..73ad8864 100644 --- a/search/all_3.js +++ b/search/all_3.js @@ -8,13 +8,15 @@ var searchData= ['cartesian_5fto_5fpolar_2ec_39',['cartesian_to_polar.c',['../d6/d2e/cartesian__to__polar_8c.html',1,'']]], ['check_5ftermination_40',['check_termination',['../da/d38/durand__kerner__roots_8c.html#a26d5695ebed0818a3e7cf4b10aacab52',1,'durand_kerner_roots.c']]], ['client_2ec_41',['client.c',['../dd/d93/client_8c.html',1,'']]], - ['collatz_42',['collatz',['../d4/dea/problem__14_2sol1_8c.html#a81c1df5c17cb16bcc16e346fcff6fa80',1,'sol1.c']]], - ['collatz_2ec_43',['collatz.c',['../dc/d80/collatz_8c.html',1,'']]], - ['compare_44',['compare',['../d1/df9/problem__26_2sol1_8c.html#ac70138609ef6aa6fabca57aca8681e83',1,'sol1.c']]], - ['complex_5fstr_45',['complex_str',['../da/d38/durand__kerner__roots_8c.html#afa5b04ce11475d67049cba8273741fb7',1,'durand_kerner_roots.c']]], - ['count_5fdivisors_46',['count_divisors',['../d7/d1f/problem__12_2sol1_8c.html#aa6ce6271f6156e219f9b290717f5a222',1,'sol1.c']]], - ['crc32_47',['crc32',['../d7/d3b/group__hash.html#ga483e7ee6db1dc09a0f3e683e028ec567',1,'hash_crc32.c']]], - ['create_5fmatrix_48',['create_matrix',['../d7/d50/qr__eigen__values_8c.html#a7d96c5e4ae1bd6d29791bcc23a4cb2b0',1,'qr_eigen_values.c']]], - ['create_5fnode_49',['create_node',['../df/d3c/threaded__binary__trees_8c.html#ab21d1d36d95001defbca2f6abd4d410c',1,'threaded_binary_trees.c']]], - ['code_20style_20convention_50',['Code style convention',['../dc/d64/md__coding_guidelines.html',1,'']]] + ['cluster_42',['cluster',['../d1/d99/structcluster.html',1,'']]], + ['collatz_43',['collatz',['../d4/dea/problem__14_2sol1_8c.html#a81c1df5c17cb16bcc16e346fcff6fa80',1,'sol1.c']]], + ['collatz_2ec_44',['collatz.c',['../dc/d80/collatz_8c.html',1,'']]], + ['compare_45',['compare',['../d1/df9/problem__26_2sol1_8c.html#ac70138609ef6aa6fabca57aca8681e83',1,'sol1.c']]], + ['complex_5fstr_46',['complex_str',['../da/d38/durand__kerner__roots_8c.html#afa5b04ce11475d67049cba8273741fb7',1,'durand_kerner_roots.c']]], + ['count_47',['count',['../d1/d99/structcluster.html#aaacf0562ee2d9e8866c66ddaa6527c2b',1,'cluster']]], + ['count_5fdivisors_48',['count_divisors',['../d7/d1f/problem__12_2sol1_8c.html#aa6ce6271f6156e219f9b290717f5a222',1,'sol1.c']]], + ['crc32_49',['crc32',['../d7/d3b/group__hash.html#ga483e7ee6db1dc09a0f3e683e028ec567',1,'hash_crc32.c']]], + ['create_5fmatrix_50',['create_matrix',['../d7/d50/qr__eigen__values_8c.html#a7d96c5e4ae1bd6d29791bcc23a4cb2b0',1,'qr_eigen_values.c']]], + ['create_5fnode_51',['create_node',['../df/d3c/threaded__binary__trees_8c.html#ab21d1d36d95001defbca2f6abd4d410c',1,'threaded_binary_trees.c']]], + ['code_20style_20convention_52',['Code style convention',['../dc/d64/md__coding_guidelines.html',1,'']]] ]; diff --git a/search/all_4.js b/search/all_4.js index acad1cb8..9e263d7a 100644 --- a/search/all_4.js +++ b/search/all_4.js @@ -1,21 +1,21 @@ var searchData= [ - ['d_5ffunc_51',['d_func',['../dd/d08/newton__raphson__root_8c.html#ae713a1fd0c275fbec7edf263ac2c0337',1,'newton_raphson_root.c']]], - ['data_52',['data',['../df/dea/structdata.html',1,'data'],['../d5/da1/structnode.html#a2d890bb9f6af0ffd73fe79b21124c2a2',1,'node::data()'],['../db/d8b/struct_node.html#a87c003c9f600e3fc58e6e90835f0b605',1,'Node::data()'],['../d8/db8/structkohonen__array__3d.html#ad546baa2e81c6196d5f1dc0fe2e5bd59',1,'kohonen_array_3d::data()']]], - ['decimal_5fto_5fbinary_53',['decimal_to_binary',['../d8/d30/decimal__to__binary__recursion_8c.html#acbbe6358ec95b3201865a72b2ac522c8',1,'decimal_to_binary_recursion.c']]], - ['decimal_5fto_5fbinary_5frecursion_2ec_54',['decimal_to_binary_recursion.c',['../d8/d30/decimal__to__binary__recursion_8c.html',1,'']]], - ['delete_55',['delete',['../da/d02/binary__search__tree_8c.html#a748f3966920e2fd197906be1e151b127',1,'binary_search_tree.c']]], - ['delete_5fadaline_56',['delete_adaline',['../da/d2a/group__adaline.html#ga6f35caa3084772cc126ac7b20f67f665',1,'adaline_learning.c']]], - ['delete_5fbt_57',['delete_bt',['../df/d3c/threaded__binary__trees_8c.html#a284d683f74b6c884e79ba00d3d1c3317',1,'threaded_binary_trees.c']]], - ['delete_5fnumber_58',['delete_number',['../d6/d3d/factorial__large__number_8c.html#ab5c854e0df76165c31899e69eceeeaae',1,'factorial_large_number.c']]], - ['dict_59',['Dict',['../d4/dfe/struct_dict.html',1,'']]], - ['digits_60',['digits',['../d3/d5a/struct__large__num.html#afaf353a072cf050ac86ac6e39868bcc9',1,'_large_num']]], - ['dim1_61',['dim1',['../d8/db8/structkohonen__array__3d.html#a16720581653fa9a34d1029e7229a7377',1,'kohonen_array_3d']]], - ['dim2_62',['dim2',['../d8/db8/structkohonen__array__3d.html#a888d7e007b38c91c7933e12a9566af1d',1,'kohonen_array_3d']]], - ['dim3_63',['dim3',['../d8/db8/structkohonen__array__3d.html#a160f14830bdfbbf9f422f382ee754dbf',1,'kohonen_array_3d']]], - ['display_64',['display',['../dc/d2e/lu__decompose_8c.html#a0789beb8d3396582d77b7aedf5e5554a',1,'display(double **A, int N): lu_decompose.c'],['../d5/d4c/group__sorting.html#gad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bubble_sort.c']]], - ['djb2_65',['djb2',['../d7/d3b/group__hash.html#ga1ac362fa25f7c35d104205985f8e754b',1,'hash_djb2.c']]], - ['durand_5fkerner_5froots_2ec_66',['durand_kerner_roots.c',['../da/d38/durand__kerner__roots_8c.html',1,'']]], - ['dynamic_5farray_67',['dynamic_array',['../d6/d42/structdynamic__array.html',1,'']]], - ['dictionary_68',['Dictionary',['../de/d20/md_data_structures_dictionary__r_e_a_d_m_e.html',1,'']]] + ['d_5ffunc_53',['d_func',['../dd/d08/newton__raphson__root_8c.html#ae713a1fd0c275fbec7edf263ac2c0337',1,'newton_raphson_root.c']]], + ['data_54',['data',['../df/dea/structdata.html',1,'data'],['../d5/da1/structnode.html#a2d890bb9f6af0ffd73fe79b21124c2a2',1,'node::data()'],['../db/d8b/struct_node.html#a87c003c9f600e3fc58e6e90835f0b605',1,'Node::data()'],['../d8/db8/structkohonen__array__3d.html#ad546baa2e81c6196d5f1dc0fe2e5bd59',1,'kohonen_array_3d::data()']]], + ['decimal_5fto_5fbinary_55',['decimal_to_binary',['../d8/d30/decimal__to__binary__recursion_8c.html#acbbe6358ec95b3201865a72b2ac522c8',1,'decimal_to_binary_recursion.c']]], + ['decimal_5fto_5fbinary_5frecursion_2ec_56',['decimal_to_binary_recursion.c',['../d8/d30/decimal__to__binary__recursion_8c.html',1,'']]], + ['delete_57',['delete',['../da/d02/binary__search__tree_8c.html#a748f3966920e2fd197906be1e151b127',1,'binary_search_tree.c']]], + ['delete_5fadaline_58',['delete_adaline',['../da/d2a/group__adaline.html#ga6f35caa3084772cc126ac7b20f67f665',1,'adaline_learning.c']]], + ['delete_5fbt_59',['delete_bt',['../df/d3c/threaded__binary__trees_8c.html#a284d683f74b6c884e79ba00d3d1c3317',1,'threaded_binary_trees.c']]], + ['delete_5fnumber_60',['delete_number',['../d6/d3d/factorial__large__number_8c.html#ab5c854e0df76165c31899e69eceeeaae',1,'factorial_large_number.c']]], + ['dict_61',['Dict',['../d4/dfe/struct_dict.html',1,'']]], + ['digits_62',['digits',['../d3/d5a/struct__large__num.html#afaf353a072cf050ac86ac6e39868bcc9',1,'_large_num']]], + ['dim1_63',['dim1',['../d8/db8/structkohonen__array__3d.html#a16720581653fa9a34d1029e7229a7377',1,'kohonen_array_3d']]], + ['dim2_64',['dim2',['../d8/db8/structkohonen__array__3d.html#a888d7e007b38c91c7933e12a9566af1d',1,'kohonen_array_3d']]], + ['dim3_65',['dim3',['../d8/db8/structkohonen__array__3d.html#a160f14830bdfbbf9f422f382ee754dbf',1,'kohonen_array_3d']]], + ['display_66',['display',['../dc/d2e/lu__decompose_8c.html#a0789beb8d3396582d77b7aedf5e5554a',1,'display(double **A, int N): lu_decompose.c'],['../d5/d4c/group__sorting.html#gad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bubble_sort.c']]], + ['djb2_67',['djb2',['../d7/d3b/group__hash.html#ga1ac362fa25f7c35d104205985f8e754b',1,'hash_djb2.c']]], + ['durand_5fkerner_5froots_2ec_68',['durand_kerner_roots.c',['../da/d38/durand__kerner__roots_8c.html',1,'']]], + ['dynamic_5farray_69',['dynamic_array',['../d6/d42/structdynamic__array.html',1,'']]], + ['dictionary_70',['Dictionary',['../de/d20/md_data_structures_dictionary__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/all_5.js b/search/all_5.js index d8ce02a9..961ad807 100644 --- a/search/all_5.js +++ b/search/all_5.js @@ -1,10 +1,10 @@ var searchData= [ - ['edge_69',['Edge',['../d5/db4/struct_edge.html',1,'']]], - ['eigen_5fvalues_70',['eigen_values',['../d7/d50/qr__eigen__values_8c.html#a0d8ed79786d17df48396b333c09d05bb',1,'qr_eigen_values.c']]], - ['elem_71',['elem',['../d0/d6b/structelem.html',1,'']]], - ['end_72',['end',['../d9/dd7/struct__cantor__set.html#acfc25ab716a3c79be8a5a4cab94e8def',1,'_cantor_set']]], - ['epsilon_73',['EPSILON',['../d7/d50/qr__eigen__values_8c.html#a002b2f4894492820fe708b1b7e7c5e70',1,'qr_eigen_values.c']]], - ['eta_74',['eta',['../d2/daa/structadaline.html#a85dbd7cce6195d11ebb388220b96bde2',1,'adaline']]], - ['exact_5fsolution_75',['exact_solution',['../d4/d07/ode__forward__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_semi_implicit_euler.c']]] + ['edge_71',['Edge',['../d5/db4/struct_edge.html',1,'']]], + ['eigen_5fvalues_72',['eigen_values',['../d7/d50/qr__eigen__values_8c.html#a0d8ed79786d17df48396b333c09d05bb',1,'qr_eigen_values.c']]], + ['elem_73',['elem',['../d0/d6b/structelem.html',1,'']]], + ['end_74',['end',['../d9/dd7/struct__cantor__set.html#acfc25ab716a3c79be8a5a4cab94e8def',1,'_cantor_set']]], + ['epsilon_75',['EPSILON',['../d7/d50/qr__eigen__values_8c.html#a002b2f4894492820fe708b1b7e7c5e70',1,'qr_eigen_values.c']]], + ['eta_76',['eta',['../d2/daa/structadaline.html#a85dbd7cce6195d11ebb388220b96bde2',1,'adaline']]], + ['exact_5fsolution_77',['exact_solution',['../d4/d07/ode__forward__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_semi_implicit_euler.c']]] ]; diff --git a/search/all_6.js b/search/all_6.js index a7ba3833..37393139 100644 --- a/search/all_6.js +++ b/search/all_6.js @@ -1,11 +1,11 @@ var searchData= [ - ['factorial_5flarge_5fnumber_2ec_76',['factorial_large_number.c',['../d6/d3d/factorial__large__number_8c.html',1,'']]], - ['fib_77',['fib',['../d4/d99/fibonacci__fast_8c.html#a7a3d55bd19854075cba2eed6b63cb2d3',1,'fibonacci_fast.c']]], - ['fibonacci_5ffast_2ec_78',['fibonacci_fast.c',['../d4/d99/fibonacci__fast_8c.html',1,'']]], - ['find_79',['find',['../da/d02/binary__search__tree_8c.html#adff4c6248834a9944a1fb03a20230c9c',1,'find(node *root, int data): binary_search_tree.c'],['../df/df3/union__find_8c.html#a3e13b69cce5a1b25ae034798092f3d86',1,'find(int *p, int x): union_find.c']]], - ['forward_5feuler_80',['forward_euler',['../d4/d07/ode__forward__euler_8c.html#aaf88ad8f9f7c39fc38f3f03d6fea9df9',1,'ode_forward_euler.c']]], - ['forward_5feuler_5fstep_81',['forward_euler_step',['../d4/d07/ode__forward__euler_8c.html#ae6c9413953c8d9d4bc9e374b29586350',1,'ode_forward_euler.c']]], - ['free_5fmemory_82',['free_memory',['../dc/d80/cantor__set_8c.html#a85df3c64a683100ac6246e1e034df43d',1,'cantor_set.c']]], - ['func_83',['func',['../dd/d93/client_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): client.c'],['../d1/d20/server_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): server.c'],['../dd/d08/newton__raphson__root_8c.html#a72f87d423a488946b319627a454d3925',1,'func(double complex x): newton_raphson_root.c']]] + ['factorial_5flarge_5fnumber_2ec_78',['factorial_large_number.c',['../d6/d3d/factorial__large__number_8c.html',1,'']]], + ['fib_79',['fib',['../d4/d99/fibonacci__fast_8c.html#a7a3d55bd19854075cba2eed6b63cb2d3',1,'fibonacci_fast.c']]], + ['fibonacci_5ffast_2ec_80',['fibonacci_fast.c',['../d4/d99/fibonacci__fast_8c.html',1,'']]], + ['find_81',['find',['../da/d02/binary__search__tree_8c.html#adff4c6248834a9944a1fb03a20230c9c',1,'find(node *root, int data): binary_search_tree.c'],['../df/df3/union__find_8c.html#a3e13b69cce5a1b25ae034798092f3d86',1,'find(int *p, int x): union_find.c']]], + ['forward_5feuler_82',['forward_euler',['../d4/d07/ode__forward__euler_8c.html#aaf88ad8f9f7c39fc38f3f03d6fea9df9',1,'ode_forward_euler.c']]], + ['forward_5feuler_5fstep_83',['forward_euler_step',['../d4/d07/ode__forward__euler_8c.html#ae6c9413953c8d9d4bc9e374b29586350',1,'ode_forward_euler.c']]], + ['free_5fmemory_84',['free_memory',['../dc/d80/cantor__set_8c.html#a85df3c64a683100ac6246e1e034df43d',1,'cantor_set.c']]], + ['func_85',['func',['../dd/d93/client_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): client.c'],['../d1/d20/server_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): server.c'],['../dd/d08/newton__raphson__root_8c.html#a72f87d423a488946b319627a454d3925',1,'func(double complex x): newton_raphson_root.c']]] ]; diff --git a/search/all_7.js b/search/all_7.js index 9b87f021..4311cf27 100644 --- a/search/all_7.js +++ b/search/all_7.js @@ -1,18 +1,19 @@ var searchData= [ - ['gcd_84',['gcd',['../df/de7/problem__5_2sol_8c.html#a59347107cbfdf48d51108e50280e760d',1,'sol.c']]], - ['get_5fclock_5fdiff_85',['get_clock_diff',['../d2/df6/kohonen__som__topology_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_trace.c']]], - ['get_5fdigits_86',['get_digits',['../d8/d32/problem__25_2sol1_8c.html#a2b90df6bfbf0d18cd9a19c1a71453783',1,'sol1.c']]], - ['get_5fdivisors_87',['get_divisors',['../d4/d83/problem__401_2sol1_8c.html#a7380e14d595d560007b02ce516b6b215',1,'sol1.c']]], - ['get_5fmin_5f2d_88',['get_min_2d',['../d1/d6b/group__kohonen__2d.html#gadc22d512c00a9f5799ee067f4fb90b4b',1,'kohonen_som_topology.c']]], - ['get_5fmonth_5fdays_89',['get_month_days',['../dd/df0/problem__19_2sol1_8c.html#ab7f9ad087f124b8e0615aa535b4c8a75',1,'sol1.c']]], - ['get_5fnext_5fabundant_90',['get_next_abundant',['../d7/ddb/problem__23_2sol1_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol2.c']]], - ['get_5fnext_5funknown_91',['get_next_unknown',['../d5/df4/group__sudoku.html#ga62e94fc39f116e2c81daed8f5437431b',1,'sudoku_solver.c']]], - ['get_5fnumber_92',['get_number',['../db/d01/problem__13_2sol1_8c.html#ac260f58785fb20eb09bb35385a7d47f8',1,'sol1.c']]], - ['get_5fperfect_5fnumber_93',['get_perfect_number',['../d7/ddb/problem__23_2sol1_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol2.c']]], - ['get_5fproduct_94',['get_product',['../dc/d63/problem__8_2sol1_8c.html#a9ffc8845f17b01a353767a40a3adf7bd',1,'sol1.c']]], - ['get_5frand_95',['get_rand',['../d6/d2e/cartesian__to__polar_8c.html#a60e62b809ca9dcb1b20a140b30d30f60',1,'cartesian_to_polar.c']]], - ['getmax_96',['getMax',['../da/d02/binary__search__tree_8c.html#ad297e528a7bb8604ca93af149d609150',1,'binary_search_tree.c']]], - ['graph_97',['Graph',['../d4/dd4/struct_graph.html',1,'']]], - ['graphrep_98',['GraphRep',['../d2/d6a/struct_graph_rep.html',1,'']]] + ['gcd_86',['gcd',['../df/de7/problem__5_2sol_8c.html#a59347107cbfdf48d51108e50280e760d',1,'sol.c']]], + ['get_5fclock_5fdiff_87',['get_clock_diff',['../d2/df6/kohonen__som__topology_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_trace.c']]], + ['get_5fdigits_88',['get_digits',['../d8/d32/problem__25_2sol1_8c.html#a2b90df6bfbf0d18cd9a19c1a71453783',1,'sol1.c']]], + ['get_5fdivisors_89',['get_divisors',['../d4/d83/problem__401_2sol1_8c.html#a7380e14d595d560007b02ce516b6b215',1,'sol1.c']]], + ['get_5fmin_5f2d_90',['get_min_2d',['../d1/d6b/group__kohonen__2d.html#gadc22d512c00a9f5799ee067f4fb90b4b',1,'kohonen_som_topology.c']]], + ['get_5fmonth_5fdays_91',['get_month_days',['../dd/df0/problem__19_2sol1_8c.html#ab7f9ad087f124b8e0615aa535b4c8a75',1,'sol1.c']]], + ['get_5fnext_5fabundant_92',['get_next_abundant',['../d7/ddb/problem__23_2sol1_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol2.c']]], + ['get_5fnext_5funknown_93',['get_next_unknown',['../d5/df4/group__sudoku.html#ga62e94fc39f116e2c81daed8f5437431b',1,'sudoku_solver.c']]], + ['get_5fnumber_94',['get_number',['../db/d01/problem__13_2sol1_8c.html#ac260f58785fb20eb09bb35385a7d47f8',1,'sol1.c']]], + ['get_5fperfect_5fnumber_95',['get_perfect_number',['../d7/ddb/problem__23_2sol1_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol2.c']]], + ['get_5fproduct_96',['get_product',['../dc/d63/problem__8_2sol1_8c.html#a9ffc8845f17b01a353767a40a3adf7bd',1,'sol1.c']]], + ['get_5frand_97',['get_rand',['../d6/d2e/cartesian__to__polar_8c.html#a60e62b809ca9dcb1b20a140b30d30f60',1,'cartesian_to_polar.c']]], + ['getmax_98',['getMax',['../da/d02/binary__search__tree_8c.html#ad297e528a7bb8604ca93af149d609150',1,'binary_search_tree.c']]], + ['graph_99',['Graph',['../d4/dd4/struct_graph.html',1,'']]], + ['graphrep_100',['GraphRep',['../d2/d6a/struct_graph_rep.html',1,'']]], + ['group_101',['group',['../d1/d5e/structobservation.html#a2db8ace685c08aa7b52f5a28b0843aab',1,'observation']]] ]; diff --git a/search/all_8.js b/search/all_8.js index e69e5960..6901853c 100644 --- a/search/all_8.js +++ b/search/all_8.js @@ -1,12 +1,12 @@ var searchData= [ - ['hash_20algorithms_99',['Hash algorithms',['../d7/d3b/group__hash.html',1,'']]], - ['hash_5fadler32_2ec_100',['hash_adler32.c',['../d3/d39/hash__adler32_8c.html',1,'']]], - ['hash_5fcrc32_2ec_101',['hash_crc32.c',['../d9/dc9/hash__crc32_8c.html',1,'']]], - ['hash_5fdjb2_2ec_102',['hash_djb2.c',['../d4/de3/hash__djb2_8c.html',1,'']]], - ['hash_5fsdbm_2ec_103',['hash_sdbm.c',['../d7/d0c/hash__sdbm_8c.html',1,'']]], - ['hash_5fset_5ft_104',['hash_set_t',['../d0/df1/structhash__set__t.html',1,'']]], - ['hash_5fxor8_2ec_105',['hash_xor8.c',['../d0/d57/hash__xor8_8c.html',1,'']]], - ['height_106',['height',['../da/d02/binary__search__tree_8c.html#ae4a66d8b0c2b0d626aea45977e358c83',1,'binary_search_tree.c']]], - ['hash_20algorithms_107',['Hash algorithms',['../d4/dcb/md_hash__r_e_a_d_m_e.html',1,'']]] + ['hash_20algorithms_102',['Hash algorithms',['../d7/d3b/group__hash.html',1,'']]], + ['hash_5fadler32_2ec_103',['hash_adler32.c',['../d3/d39/hash__adler32_8c.html',1,'']]], + ['hash_5fcrc32_2ec_104',['hash_crc32.c',['../d9/dc9/hash__crc32_8c.html',1,'']]], + ['hash_5fdjb2_2ec_105',['hash_djb2.c',['../d4/de3/hash__djb2_8c.html',1,'']]], + ['hash_5fsdbm_2ec_106',['hash_sdbm.c',['../d7/d0c/hash__sdbm_8c.html',1,'']]], + ['hash_5fset_5ft_107',['hash_set_t',['../d0/df1/structhash__set__t.html',1,'']]], + ['hash_5fxor8_2ec_108',['hash_xor8.c',['../d0/d57/hash__xor8_8c.html',1,'']]], + ['height_109',['height',['../da/d02/binary__search__tree_8c.html#ae4a66d8b0c2b0d626aea45977e358c83',1,'binary_search_tree.c']]], + ['hash_20algorithms_110',['Hash algorithms',['../d4/dcb/md_hash__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/all_9.js b/search/all_9.js index 74a1c621..f1183be7 100644 --- a/search/all_9.js +++ b/search/all_9.js @@ -1,19 +1,19 @@ var searchData= [ - ['inorder_108',['inOrder',['../da/d02/binary__search__tree_8c.html#a0f18adaaca5ecc410cfa16dd2a3684dc',1,'binary_search_tree.c']]], - ['inorder_5fdisplay_109',['inorder_display',['../df/d3c/threaded__binary__trees_8c.html#a4c1e06b5f0876ec9c1bd6817f3b7eda7',1,'threaded_binary_trees.c']]], - ['insert_110',['insert',['../da/d02/binary__search__tree_8c.html#a73152b9ccb4aa5cd4c1bacd4188bb2de',1,'binary_search_tree.c']]], - ['insert_5fbt_111',['insert_bt',['../df/d3c/threaded__binary__trees_8c.html#a823432888332fc9f0aa6072cff28c3bb',1,'threaded_binary_trees.c']]], - ['insertion_5fsort_2ec_112',['insertion_sort.c',['../db/ddf/insertion__sort_8c.html',1,'']]], - ['insertionsort_113',['insertionSort',['../db/ddf/insertion__sort_8c.html#a0d6c227641a5e0dae580b3a18df241fb',1,'insertion_sort.c']]], - ['int_5fto_5fstring_114',['int_to_string',['../dd/d53/int__to__string_8c.html#a969911f32f1c435bb2bf166574ef9ae5',1,'int_to_string.c']]], - ['int_5fto_5fstring_2ec_115',['int_to_string.c',['../dd/d53/int__to__string_8c.html',1,'']]], - ['is_5fabundant_116',['is_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a4f128410e6582fe26488e2316cc96e17',1,'is_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a34f4ad85151e3a43368ae67f42347f56',1,'is_abundant(unsigned long N): sol2.c']]], - ['is_5fin_117',['is_in',['../d4/d83/problem__401_2sol1_8c.html#a4441a6d27134cf3aed05727800d99456',1,'sol1.c']]], - ['is_5fleap_5fyear_118',['is_leap_year',['../dd/df0/problem__19_2sol1_8c.html#a6561b1adc8a19c092679b9874da24e2e',1,'sol1.c']]], - ['is_5fpalindromic_119',['is_palindromic',['../d0/d6c/problem__4_2sol_8c.html#adf9bea8d35848959bde5b3f277edf0c4',1,'sol.c']]], - ['is_5fprime_120',['is_prime',['../d0/d6d/problem__10_2sol1_8c.html#acc871ab6bfead702e983a7f9c412915f',1,'sol1.c']]], - ['is_5fsum_5fof_5fabundant_121',['is_sum_of_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol2.c']]], - ['ispalindrome_122',['isPalindrome',['../df/d16/palindrome_8c.html#a6320493ddee0ca4614423721c5d6f4ba',1,'palindrome.c']]], - ['isprime_123',['isprime',['../d7/dd3/problem__3_2sol1_8c.html#aa0f4796aa2e89c327f827bd55f5cb305',1,'sol1.c']]] + ['inorder_111',['inOrder',['../da/d02/binary__search__tree_8c.html#a0f18adaaca5ecc410cfa16dd2a3684dc',1,'binary_search_tree.c']]], + ['inorder_5fdisplay_112',['inorder_display',['../df/d3c/threaded__binary__trees_8c.html#a4c1e06b5f0876ec9c1bd6817f3b7eda7',1,'threaded_binary_trees.c']]], + ['insert_113',['insert',['../da/d02/binary__search__tree_8c.html#a73152b9ccb4aa5cd4c1bacd4188bb2de',1,'binary_search_tree.c']]], + ['insert_5fbt_114',['insert_bt',['../df/d3c/threaded__binary__trees_8c.html#a823432888332fc9f0aa6072cff28c3bb',1,'threaded_binary_trees.c']]], + ['insertion_5fsort_2ec_115',['insertion_sort.c',['../db/ddf/insertion__sort_8c.html',1,'']]], + ['insertionsort_116',['insertionSort',['../db/ddf/insertion__sort_8c.html#a0d6c227641a5e0dae580b3a18df241fb',1,'insertion_sort.c']]], + ['int_5fto_5fstring_117',['int_to_string',['../dd/d53/int__to__string_8c.html#a969911f32f1c435bb2bf166574ef9ae5',1,'int_to_string.c']]], + ['int_5fto_5fstring_2ec_118',['int_to_string.c',['../dd/d53/int__to__string_8c.html',1,'']]], + ['is_5fabundant_119',['is_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a4f128410e6582fe26488e2316cc96e17',1,'is_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a34f4ad85151e3a43368ae67f42347f56',1,'is_abundant(unsigned long N): sol2.c']]], + ['is_5fin_120',['is_in',['../d4/d83/problem__401_2sol1_8c.html#a4441a6d27134cf3aed05727800d99456',1,'sol1.c']]], + ['is_5fleap_5fyear_121',['is_leap_year',['../dd/df0/problem__19_2sol1_8c.html#a6561b1adc8a19c092679b9874da24e2e',1,'sol1.c']]], + ['is_5fpalindromic_122',['is_palindromic',['../d0/d6c/problem__4_2sol_8c.html#adf9bea8d35848959bde5b3f277edf0c4',1,'sol.c']]], + ['is_5fprime_123',['is_prime',['../d0/d6d/problem__10_2sol1_8c.html#acc871ab6bfead702e983a7f9c412915f',1,'sol1.c']]], + ['is_5fsum_5fof_5fabundant_124',['is_sum_of_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol2.c']]], + ['ispalindrome_125',['isPalindrome',['../df/d16/palindrome_8c.html#a6320493ddee0ca4614423721c5d6f4ba',1,'palindrome.c']]], + ['isprime_126',['isprime',['../d7/dd3/problem__3_2sol1_8c.html#aa0f4796aa2e89c327f827bd55f5cb305',1,'sol1.c']]] ]; diff --git a/search/all_a.js b/search/all_a.js index 3cf0477c..f08ab987 100644 --- a/search/all_a.js +++ b/search/all_a.js @@ -1,6 +1,6 @@ var searchData= [ - ['join_124',['join',['../df/df3/union__find_8c.html#af2f3ff6d98641f7d3be11f071c97908a',1,'union_find.c']]], - ['jump_5fsearch_125',['jump_search',['../d6/d7b/jump__search_8c.html#aff36d719e6fca6aea4377a089580c603',1,'jump_search.c']]], - ['jump_5fsearch_2ec_126',['jump_search.c',['../d6/d7b/jump__search_8c.html',1,'']]] + ['join_127',['join',['../df/df3/union__find_8c.html#af2f3ff6d98641f7d3be11f071c97908a',1,'union_find.c']]], + ['jump_5fsearch_128',['jump_search',['../d6/d7b/jump__search_8c.html#aff36d719e6fca6aea4377a089580c603',1,'jump_search.c']]], + ['jump_5fsearch_2ec_129',['jump_search.c',['../d6/d7b/jump__search_8c.html',1,'']]] ]; diff --git a/search/all_b.js b/search/all_b.js index 67c9fec2..29f9285d 100644 --- a/search/all_b.js +++ b/search/all_b.js @@ -1,13 +1,14 @@ var searchData= [ - ['kohonen_20som_20trace_2fchain_20algorithm_127',['Kohonen SOM trace/chain algorithm',['../d0/dcb/group__kohonen__1d.html',1,'']]], - ['kohonen_20som_20topology_20algorithm_128',['Kohonen SOM topology algorithm',['../d1/d6b/group__kohonen__2d.html',1,'']]], - ['kohonen_5farray_5f3d_129',['kohonen_array_3d',['../d8/db8/structkohonen__array__3d.html',1,'']]], - ['kohonen_5fdata_5f3d_130',['kohonen_data_3d',['../d1/d6b/group__kohonen__2d.html#ga8df35f04c1762a01dcf108fa13b897d6',1,'kohonen_som_topology.c']]], - ['kohonen_5fget_5fmin_5f1d_131',['kohonen_get_min_1d',['../d0/dcb/group__kohonen__1d.html#ga4a57a413a3cef286a7da6d4666575586',1,'kohonen_som_trace.c']]], - ['kohonen_5fsom_132',['kohonen_som',['../d1/d6b/group__kohonen__2d.html#gacb42eda8af6ebd6a141a34ab00a0b710',1,'kohonen_som_topology.c']]], - ['kohonen_5fsom_5ftopology_2ec_133',['kohonen_som_topology.c',['../d2/df6/kohonen__som__topology_8c.html',1,'']]], - ['kohonen_5fsom_5ftrace_2ec_134',['kohonen_som_trace.c',['../d0/d46/kohonen__som__trace_8c.html',1,'']]], - ['kohonen_5fsom_5ftracer_135',['kohonen_som_tracer',['../d0/dcb/group__kohonen__1d.html#gaeaeffbff2be4d5d15b0d4f10f846abde',1,'kohonen_som_trace.c']]], - ['kohonen_5fupdate_5fweights_136',['kohonen_update_weights',['../d1/d6b/group__kohonen__2d.html#ga83abb572c60d202e100595a989dfe123',1,'kohonen_update_weights(const double *X, struct kohonen_array_3d *W, double **D, int num_out, int num_features, double alpha, int R): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gae334493a0917a24736fe5ba82aa6f81f',1,'kohonen_update_weights(double const *x, double *const *W, double *D, int num_out, int num_features, double alpha, int R): kohonen_som_trace.c']]] + ['k_2dmeans_20clustering_20algorithm_130',['K-Means Clustering Algorithm',['../d8/d71/group__k__means.html',1,'']]], + ['kohonen_20som_20trace_2fchain_20algorithm_131',['Kohonen SOM trace/chain algorithm',['../d0/dcb/group__kohonen__1d.html',1,'']]], + ['kohonen_20som_20topology_20algorithm_132',['Kohonen SOM topology algorithm',['../d1/d6b/group__kohonen__2d.html',1,'']]], + ['kohonen_5farray_5f3d_133',['kohonen_array_3d',['../d8/db8/structkohonen__array__3d.html',1,'']]], + ['kohonen_5fdata_5f3d_134',['kohonen_data_3d',['../d1/d6b/group__kohonen__2d.html#ga8df35f04c1762a01dcf108fa13b897d6',1,'kohonen_som_topology.c']]], + ['kohonen_5fget_5fmin_5f1d_135',['kohonen_get_min_1d',['../d0/dcb/group__kohonen__1d.html#ga4a57a413a3cef286a7da6d4666575586',1,'kohonen_som_trace.c']]], + ['kohonen_5fsom_136',['kohonen_som',['../d1/d6b/group__kohonen__2d.html#gacb42eda8af6ebd6a141a34ab00a0b710',1,'kohonen_som_topology.c']]], + ['kohonen_5fsom_5ftopology_2ec_137',['kohonen_som_topology.c',['../d2/df6/kohonen__som__topology_8c.html',1,'']]], + ['kohonen_5fsom_5ftrace_2ec_138',['kohonen_som_trace.c',['../d0/d46/kohonen__som__trace_8c.html',1,'']]], + ['kohonen_5fsom_5ftracer_139',['kohonen_som_tracer',['../d0/dcb/group__kohonen__1d.html#gaeaeffbff2be4d5d15b0d4f10f846abde',1,'kohonen_som_trace.c']]], + ['kohonen_5fupdate_5fweights_140',['kohonen_update_weights',['../d1/d6b/group__kohonen__2d.html#ga83abb572c60d202e100595a989dfe123',1,'kohonen_update_weights(const double *X, struct kohonen_array_3d *W, double **D, int num_out, int num_features, double alpha, int R): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gae334493a0917a24736fe5ba82aa6f81f',1,'kohonen_update_weights(double const *x, double *const *W, double *D, int num_out, int num_features, double alpha, int R): kohonen_som_trace.c']]] ]; diff --git a/search/all_c.js b/search/all_c.js index 066cd496..ab1279c1 100644 --- a/search/all_c.js +++ b/search/all_c.js @@ -1,14 +1,14 @@ var searchData= [ - ['l_137',['L',['../df/db3/struct_l.html',1,'']]], - ['large_5fnum_138',['large_num',['../d6/d3d/factorial__large__number_8c.html#ab54882961780c41a4929a6d390f6522d',1,'factorial_large_number.c']]], - ['lazy_5fsort_139',['lazy_sort',['../dd/d8b/problem__22_2sol1_8c.html#ae359b8a4656b164c91ef91a084c15c9d',1,'sol1.c']]], - ['lcm_140',['lcm',['../df/de7/problem__5_2sol_8c.html#ae9606f1867e9921867d6572f51377b4c',1,'sol.c']]], - ['left_141',['left',['../d5/da1/structnode.html#af7109e6ffd82cbbb705e486fd0ce92f0',1,'node']]], - ['lims_142',['LIMS',['../d7/d50/qr__eigen__values_8c.html#aee57a411f07599034f5ceb8cc7d65b40',1,'qr_eigen_values.c']]], - ['llink_143',['llink',['../db/d8b/struct_node.html#a60b73f452505cef98795d2c8de3e72ef',1,'Node']]], - ['lu_5fdecompose_2ec_144',['lu_decompose.c',['../dc/d2e/lu__decompose_8c.html',1,'']]], - ['lu_5fdecomposition_145',['lu_decomposition',['../dc/d2e/lu__decompose_8c.html#aae40b90a8efd645c749128cf8072bbb4',1,'lu_decompose.c']]], - ['list_20of_20all_20files_146',['List of all files',['../d5/d88/md__d_i_r_e_c_t_o_r_y.html',1,'']]], - ['leetcode_147',['LeetCode',['../df/d58/md_leetcode__r_e_a_d_m_e.html',1,'']]] + ['l_141',['L',['../df/db3/struct_l.html',1,'']]], + ['large_5fnum_142',['large_num',['../d6/d3d/factorial__large__number_8c.html#ab54882961780c41a4929a6d390f6522d',1,'factorial_large_number.c']]], + ['lazy_5fsort_143',['lazy_sort',['../dd/d8b/problem__22_2sol1_8c.html#ae359b8a4656b164c91ef91a084c15c9d',1,'sol1.c']]], + ['lcm_144',['lcm',['../df/de7/problem__5_2sol_8c.html#ae9606f1867e9921867d6572f51377b4c',1,'sol.c']]], + ['left_145',['left',['../d5/da1/structnode.html#af7109e6ffd82cbbb705e486fd0ce92f0',1,'node']]], + ['lims_146',['LIMS',['../d7/d50/qr__eigen__values_8c.html#aee57a411f07599034f5ceb8cc7d65b40',1,'qr_eigen_values.c']]], + ['llink_147',['llink',['../db/d8b/struct_node.html#a60b73f452505cef98795d2c8de3e72ef',1,'Node']]], + ['lu_5fdecompose_2ec_148',['lu_decompose.c',['../dc/d2e/lu__decompose_8c.html',1,'']]], + ['lu_5fdecomposition_149',['lu_decomposition',['../dc/d2e/lu__decompose_8c.html#aae40b90a8efd645c749128cf8072bbb4',1,'lu_decompose.c']]], + ['list_20of_20all_20files_150',['List of all files',['../d5/d88/md__d_i_r_e_c_t_o_r_y.html',1,'']]], + ['leetcode_151',['LeetCode',['../df/d58/md_leetcode__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/all_d.js b/search/all_d.js index 9dcd8b7f..5f43e624 100644 --- a/search/all_d.js +++ b/search/all_d.js @@ -1,28 +1,28 @@ var searchData= [ - ['machine_20learning_20algorithms_148',['Machine learning algorithms',['../d9/d66/group__machine__learning.html',1,'']]], - ['main_149',['main',['../dd/d93/client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): client.c'],['../d1/d20/server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): server.c'],['../da/de6/udp__client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_client.c'],['../d8/dca/udp__server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_server.c'],['../d7/dd8/c__atoi__str__to__integer_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): c_atoi_str_to_integer.c'],['../d8/d30/decimal__to__binary__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): int_to_string.c'],['../da/d02/binary__search__tree_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): threaded_binary_trees.c'],['../d7/d98/spirograph_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): spirograph.c'],['../d3/d39/hash__adler32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_adler32.c'],['../d9/dc9/hash__crc32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_crc32.c'],['../d4/de3/hash__djb2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_djb2.c'],['../d7/d0c/hash__sdbm_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_sdbm.c'],['../d0/d57/hash__xor8_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_xor8.c'],['../dd/d8c/adaline__learning_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_trace.c'],['../dc/d80/cantor__set_8c.html#abf9e6b7e6f15df4b525a2e7705ba3089',1,'main(int argc, char const *argv[]): cantor_set.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): cartesian_to_polar.c'],['../dc/d80/collatz_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): collatz.c'],['../d6/d3d/factorial__large__number_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): factorial_large_number.c'],['../d4/d99/fibonacci__fast_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): fibonacci_fast.c'],['../df/d16/palindrome_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): palindrome.c'],['../de/dac/sudoku__solver_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sudoku_solver.c'],['../df/df3/union__find_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): union_find.c'],['../da/d38/durand__kerner__roots_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): durand_kerner_roots.c'],['../dc/d2e/lu__decompose_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): lu_decompose.c'],['../dd/d08/newton__raphson__root_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): newton_raphson_root.c'],['../d4/d07/ode__forward__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_semi_implicit_euler.c'],['../d5/d23/qr__decomposition_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): qr_decomposition.c'],['../d7/d50/qr__eigen__values_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): qr_eigen_values.c'],['../dc/d47/realtime__stats_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): realtime_stats.c'],['../da/d35/problem__1_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dae/problem__1_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d6/de3/sol3_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol3.c'],['../d6/d1b/sol4_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol4.c'],['../d0/d6d/problem__10_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d9/da7/problem__10_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../d7/d1f/problem__12_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../db/d01/problem__13_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d4/dea/problem__14_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/d91/problem__15_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d6/d88/problem__16_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/df0/problem__19_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d0/d7f/so1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): so1.c'],['../db/d80/problem__20_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/d1a/problem__21_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/d8b/problem__22_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/ddb/problem__23_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol2.c'],['../d8/d32/problem__25_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d1/df9/problem__26_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d7/dd3/problem__3_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dbc/problem__3_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d0/d6c/problem__4_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d83/problem__401_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/de7/problem__5_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d7b/problem__6_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d1/d2f/problem__7_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../dc/d63/problem__8_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d2/d93/problem__8_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../df/da5/problem__9_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d8/de0/problem__9_2sol2_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol2.c'],['../df/d3b/binary__search_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): jump_search.c'],['../d3/d47/modified__binary__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): modified_binary_search.c'],['../d2/da8/bead__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): bubble_sort_recursion.c'],['../d2/d83/merge__sort_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): merge_sort.c'],['../df/d83/selection__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): selection_sort.c'],['../d6/ded/shell__sort2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): shell_sort2.c']]], - ['mat_5fmul_150',['mat_mul',['../d7/d50/qr__eigen__values_8c.html#a741477692f001a805b0fea942c9dc2b9',1,'qr_eigen_values.c']]], - ['max_151',['MAX',['../dd/d93/client_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): client.c'],['../d1/d20/server_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): server.c'],['../d1/d6b/group__kohonen__2d.html#gaffe776513b24d84b39af8ab0930fef7f',1,'max(): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gaffe776513b24d84b39af8ab0930fef7f',1,'max(): kohonen_som_trace.c']]], - ['max_5fadaline_5fiter_152',['MAX_ADALINE_ITER',['../da/d2a/group__adaline.html#ga555ba960994e9bccb2029764588f694f',1,'adaline_learning.c']]], - ['max_5fdeno_153',['MAX_DENO',['../d1/df9/problem__26_2sol1_8c.html#a619eec3220cebd7c5e455edbb14e9b12',1,'sol1.c']]], - ['max_5fdigits_154',['MAX_DIGITS',['../d8/d32/problem__25_2sol1_8c.html#a001791a21d538b8b9176287ae60d9b61',1,'sol1.c']]], - ['max_5fheap_155',['max_heap',['../d0/d8a/structmax__heap.html',1,'']]], - ['max_5flen_156',['MAX_LEN',['../d1/df9/problem__26_2sol1_8c.html#aabf4f709c8199e41cf279c77112345fe',1,'sol1.c']]], - ['max_5flength_157',['MAX_LENGTH',['../d4/d83/problem__401_2sol1_8c.html#a7a9a231e30b47bc0345749c8bd1e5077',1,'sol1.c']]], - ['max_5fname_5flen_158',['MAX_NAME_LEN',['../dd/d8b/problem__22_2sol1_8c.html#afd709f201d7643c3909621f620ea648a',1,'sol1.c']]], - ['max_5fnames_159',['MAX_NAMES',['../dd/d8b/problem__22_2sol1_8c.html#a6cb9b08aacb61416795ee78bfceacd38',1,'sol1.c']]], - ['max_5fsize_160',['MAX_SIZE',['../df/df3/union__find_8c.html#a0592dba56693fad79136250c11e5a7fe',1,'union_find.c']]], - ['maxline_161',['MAXLINE',['../da/de6/udp__client_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_client.c'],['../d8/dca/udp__server_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_server.c']]], - ['merge_162',['merge',['../d5/d4c/group__sorting.html#ga8dc3ec66cb3350313fdb34bfd1674729',1,'merge_sort.c']]], - ['merge_5fsort_163',['merge_sort',['../d5/d4c/group__sorting.html#gab99b8a397bdd0bf2903d66c22ba4ba43',1,'merge_sort.c']]], - ['merge_5fsort_2ec_164',['merge_sort.c',['../d2/d83/merge__sort_8c.html',1,'']]], - ['midpoint_5feuler_165',['midpoint_euler',['../d1/dc2/ode__midpoint__euler_8c.html#a148003d8b261d040c1c41e73b40af1dd',1,'ode_midpoint_euler.c']]], - ['midpoint_5feuler_5fstep_166',['midpoint_euler_step',['../d1/dc2/ode__midpoint__euler_8c.html#affe6cc2ab040b94a29e6c41782f72d51',1,'ode_midpoint_euler.c']]], - ['min_167',['min',['../d1/d6b/group__kohonen__2d.html#gac6afabdc09a49a433ee19d8a9486056d',1,'min(): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gac6afabdc09a49a433ee19d8a9486056d',1,'min(): kohonen_som_trace.c'],['../d6/d7b/jump__search_8c.html#a8195a86b6d75b9a3939505e8bb50021e',1,'min(): jump_search.c']]], - ['min_5fheap_168',['min_heap',['../de/dce/structmin__heap.html',1,'']]], - ['mod_5flimit_169',['MOD_LIMIT',['../d4/d83/problem__401_2sol1_8c.html#ade1bdf2529e3c58f53bfb4d844f3a9d3',1,'sol1.c']]], - ['modified_5fbinary_5fsearch_2ec_170',['modified_binary_search.c',['../d3/d47/modified__binary__search_8c.html',1,'']]], - ['modifiedbinarysearch_171',['modifiedBinarySearch',['../d3/d47/modified__binary__search_8c.html#a7df9a198e30cded6229d79bef7591f8f',1,'modified_binary_search.c']]], - ['multiply_172',['multiply',['../d6/d3d/factorial__large__number_8c.html#ad398ddbd594ca69a5e6dfc894925341e',1,'factorial_large_number.c']]] + ['machine_20learning_20algorithms_152',['Machine learning algorithms',['../d9/d66/group__machine__learning.html',1,'']]], + ['main_153',['main',['../dd/d93/client_8c.html#a51af30a60f9f02777c6396b8247e356f',1,'main(): client.c'],['../d1/d20/server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): server.c'],['../da/de6/udp__client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_client.c'],['../d8/dca/udp__server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_server.c'],['../d7/dd8/c__atoi__str__to__integer_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): c_atoi_str_to_integer.c'],['../d8/d30/decimal__to__binary__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): int_to_string.c'],['../da/d02/binary__search__tree_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): threaded_binary_trees.c'],['../d7/d98/spirograph_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): spirograph.c'],['../d3/d39/hash__adler32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_adler32.c'],['../d9/dc9/hash__crc32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_crc32.c'],['../d4/de3/hash__djb2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_djb2.c'],['../d7/d0c/hash__sdbm_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_sdbm.c'],['../d0/d57/hash__xor8_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_xor8.c'],['../dd/d8c/adaline__learning_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_trace.c'],['../dc/d80/cantor__set_8c.html#abf9e6b7e6f15df4b525a2e7705ba3089',1,'main(int argc, char const *argv[]): cantor_set.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): cartesian_to_polar.c'],['../dc/d80/collatz_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): collatz.c'],['../d6/d3d/factorial__large__number_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): factorial_large_number.c'],['../d4/d99/fibonacci__fast_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): fibonacci_fast.c'],['../df/d16/palindrome_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): palindrome.c'],['../de/dac/sudoku__solver_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sudoku_solver.c'],['../df/df3/union__find_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): union_find.c'],['../da/d38/durand__kerner__roots_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): durand_kerner_roots.c'],['../dc/d2e/lu__decompose_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): lu_decompose.c'],['../dd/d08/newton__raphson__root_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): newton_raphson_root.c'],['../d4/d07/ode__forward__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_semi_implicit_euler.c'],['../d5/d23/qr__decomposition_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): qr_decomposition.c'],['../d7/d50/qr__eigen__values_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): qr_eigen_values.c'],['../dc/d47/realtime__stats_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): realtime_stats.c'],['../da/d35/problem__1_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dae/problem__1_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d6/de3/sol3_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol3.c'],['../d6/d1b/sol4_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol4.c'],['../d0/d6d/problem__10_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d9/da7/problem__10_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../d7/d1f/problem__12_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../db/d01/problem__13_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d4/dea/problem__14_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/d91/problem__15_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d6/d88/problem__16_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/df0/problem__19_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d0/d7f/so1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): so1.c'],['../db/d80/problem__20_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/d1a/problem__21_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/d8b/problem__22_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/ddb/problem__23_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol2.c'],['../d8/d32/problem__25_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d1/df9/problem__26_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d7/dd3/problem__3_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dbc/problem__3_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d0/d6c/problem__4_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d83/problem__401_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/de7/problem__5_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d7b/problem__6_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d1/d2f/problem__7_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../dc/d63/problem__8_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d2/d93/problem__8_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../df/da5/problem__9_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d8/de0/problem__9_2sol2_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol2.c'],['../df/d3b/binary__search_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): jump_search.c'],['../d3/d47/modified__binary__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): modified_binary_search.c'],['../d2/da8/bead__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): bubble_sort_recursion.c'],['../d2/d83/merge__sort_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): merge_sort.c'],['../df/d83/selection__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): selection_sort.c'],['../d6/ded/shell__sort2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): shell_sort2.c']]], + ['mat_5fmul_154',['mat_mul',['../d7/d50/qr__eigen__values_8c.html#a741477692f001a805b0fea942c9dc2b9',1,'qr_eigen_values.c']]], + ['max_155',['MAX',['../dd/d93/client_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): client.c'],['../d1/d20/server_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): server.c'],['../d1/d6b/group__kohonen__2d.html#gaffe776513b24d84b39af8ab0930fef7f',1,'max(): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gaffe776513b24d84b39af8ab0930fef7f',1,'max(): kohonen_som_trace.c']]], + ['max_5fadaline_5fiter_156',['MAX_ADALINE_ITER',['../da/d2a/group__adaline.html#ga555ba960994e9bccb2029764588f694f',1,'adaline_learning.c']]], + ['max_5fdeno_157',['MAX_DENO',['../d1/df9/problem__26_2sol1_8c.html#a619eec3220cebd7c5e455edbb14e9b12',1,'sol1.c']]], + ['max_5fdigits_158',['MAX_DIGITS',['../d8/d32/problem__25_2sol1_8c.html#a001791a21d538b8b9176287ae60d9b61',1,'sol1.c']]], + ['max_5fheap_159',['max_heap',['../d0/d8a/structmax__heap.html',1,'']]], + ['max_5flen_160',['MAX_LEN',['../d1/df9/problem__26_2sol1_8c.html#aabf4f709c8199e41cf279c77112345fe',1,'sol1.c']]], + ['max_5flength_161',['MAX_LENGTH',['../d4/d83/problem__401_2sol1_8c.html#a7a9a231e30b47bc0345749c8bd1e5077',1,'sol1.c']]], + ['max_5fname_5flen_162',['MAX_NAME_LEN',['../dd/d8b/problem__22_2sol1_8c.html#afd709f201d7643c3909621f620ea648a',1,'sol1.c']]], + ['max_5fnames_163',['MAX_NAMES',['../dd/d8b/problem__22_2sol1_8c.html#a6cb9b08aacb61416795ee78bfceacd38',1,'sol1.c']]], + ['max_5fsize_164',['MAX_SIZE',['../df/df3/union__find_8c.html#a0592dba56693fad79136250c11e5a7fe',1,'union_find.c']]], + ['maxline_165',['MAXLINE',['../da/de6/udp__client_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_client.c'],['../d8/dca/udp__server_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_server.c']]], + ['merge_166',['merge',['../d5/d4c/group__sorting.html#ga8dc3ec66cb3350313fdb34bfd1674729',1,'merge_sort.c']]], + ['merge_5fsort_167',['merge_sort',['../d5/d4c/group__sorting.html#gab99b8a397bdd0bf2903d66c22ba4ba43',1,'merge_sort.c']]], + ['merge_5fsort_2ec_168',['merge_sort.c',['../d2/d83/merge__sort_8c.html',1,'']]], + ['midpoint_5feuler_169',['midpoint_euler',['../d1/dc2/ode__midpoint__euler_8c.html#a148003d8b261d040c1c41e73b40af1dd',1,'ode_midpoint_euler.c']]], + ['midpoint_5feuler_5fstep_170',['midpoint_euler_step',['../d1/dc2/ode__midpoint__euler_8c.html#affe6cc2ab040b94a29e6c41782f72d51',1,'ode_midpoint_euler.c']]], + ['min_171',['min',['../d1/d6b/group__kohonen__2d.html#gac6afabdc09a49a433ee19d8a9486056d',1,'min(): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gac6afabdc09a49a433ee19d8a9486056d',1,'min(): kohonen_som_trace.c'],['../d6/d7b/jump__search_8c.html#a8195a86b6d75b9a3939505e8bb50021e',1,'min(): jump_search.c']]], + ['min_5fheap_172',['min_heap',['../de/dce/structmin__heap.html',1,'']]], + ['mod_5flimit_173',['MOD_LIMIT',['../d4/d83/problem__401_2sol1_8c.html#ade1bdf2529e3c58f53bfb4d844f3a9d3',1,'sol1.c']]], + ['modified_5fbinary_5fsearch_2ec_174',['modified_binary_search.c',['../d3/d47/modified__binary__search_8c.html',1,'']]], + ['modifiedbinarysearch_175',['modifiedBinarySearch',['../d3/d47/modified__binary__search_8c.html#a7df9a198e30cded6229d79bef7591f8f',1,'modified_binary_search.c']]], + ['multiply_176',['multiply',['../d6/d3d/factorial__large__number_8c.html#ad398ddbd594ca69a5e6dfc894925341e',1,'factorial_large_number.c']]] ]; diff --git a/search/all_e.js b/search/all_e.js index c9e69fb3..def51201 100644 --- a/search/all_e.js +++ b/search/all_e.js @@ -1,15 +1,15 @@ var searchData= [ - ['n_173',['N',['../dc/d18/structsudoku.html#a160365012280c3e10f1b31e914e8f129',1,'sudoku']]], - ['n2_174',['N2',['../dc/d18/structsudoku.html#a0f01e2782e82306e6fab9a8578006f56',1,'sudoku']]], - ['new_5fadaline_175',['new_adaline',['../da/d2a/group__adaline.html#gacd88962c5f6341e43cbc69b4a7d3485b',1,'adaline_learning.c']]], - ['new_5fnumber_176',['new_number',['../d6/d3d/factorial__large__number_8c.html#ad8101f58545bd891ae8b6e11caadd7eb',1,'factorial_large_number.c']]], - ['newnode_177',['newNode',['../da/d02/binary__search__tree_8c.html#ac73c73be92dbbeeaad942c0103b9540d',1,'binary_search_tree.c']]], - ['newton_5fraphson_5froot_2ec_178',['newton_raphson_root.c',['../dd/d08/newton__raphson__root_8c.html',1,'']]], - ['next_179',['next',['../d9/dd7/struct__cantor__set.html#a2f7f9f19125725d3e5673fdb4ac8cfb1',1,'_cantor_set']]], - ['next_5fdigit_180',['next_digit',['../dc/d77/struct__big__int.html#a187538b984c86d7cfdb13e297e7f3564',1,'_big_int']]], - ['node_181',['Node',['../db/d8b/struct_node.html',1,'Node'],['../d5/da1/structnode.html',1,'node'],['../da/d02/binary__search__tree_8c.html#af4aeda155dbe167f1c1cf38cb65bf324',1,'node(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ad8ecdcce462dd8e170ae1f164935aaa6',1,'node(): threaded_binary_trees.c']]], - ['num_5fdigits_182',['num_digits',['../d3/d5a/struct__large__num.html#a3fd11c0b413bbabfb8737d4ae73e5aa0',1,'_large_num']]], - ['num_5fweights_183',['num_weights',['../d2/daa/structadaline.html#a53314e737a0a5ff4552a03bcc9dafbc1',1,'adaline']]], - ['number_5fof_5fpaths_184',['number_of_paths',['../d7/d91/problem__15_2sol1_8c.html#a4650d1d3897633d84253f93433f601d6',1,'sol1.c']]] + ['n_177',['N',['../dc/d18/structsudoku.html#a160365012280c3e10f1b31e914e8f129',1,'sudoku']]], + ['n2_178',['N2',['../dc/d18/structsudoku.html#a0f01e2782e82306e6fab9a8578006f56',1,'sudoku']]], + ['new_5fadaline_179',['new_adaline',['../da/d2a/group__adaline.html#gacd88962c5f6341e43cbc69b4a7d3485b',1,'adaline_learning.c']]], + ['new_5fnumber_180',['new_number',['../d6/d3d/factorial__large__number_8c.html#ad8101f58545bd891ae8b6e11caadd7eb',1,'factorial_large_number.c']]], + ['newnode_181',['newNode',['../da/d02/binary__search__tree_8c.html#ac73c73be92dbbeeaad942c0103b9540d',1,'binary_search_tree.c']]], + ['newton_5fraphson_5froot_2ec_182',['newton_raphson_root.c',['../dd/d08/newton__raphson__root_8c.html',1,'']]], + ['next_183',['next',['../d9/dd7/struct__cantor__set.html#a2f7f9f19125725d3e5673fdb4ac8cfb1',1,'_cantor_set']]], + ['next_5fdigit_184',['next_digit',['../dc/d77/struct__big__int.html#a187538b984c86d7cfdb13e297e7f3564',1,'_big_int']]], + ['node_185',['Node',['../db/d8b/struct_node.html',1,'Node'],['../d5/da1/structnode.html',1,'node'],['../da/d02/binary__search__tree_8c.html#af4aeda155dbe167f1c1cf38cb65bf324',1,'node(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ad8ecdcce462dd8e170ae1f164935aaa6',1,'node(): threaded_binary_trees.c']]], + ['num_5fdigits_186',['num_digits',['../d3/d5a/struct__large__num.html#a3fd11c0b413bbabfb8737d4ae73e5aa0',1,'_large_num']]], + ['num_5fweights_187',['num_weights',['../d2/daa/structadaline.html#a53314e737a0a5ff4552a03bcc9dafbc1',1,'adaline']]], + ['number_5fof_5fpaths_188',['number_of_paths',['../d7/d91/problem__15_2sol1_8c.html#a4650d1d3897633d84253f93433f601d6',1,'sol1.c']]] ]; diff --git a/search/all_f.js b/search/all_f.js index 585826c3..2199be31 100644 --- a/search/all_f.js +++ b/search/all_f.js @@ -1,11 +1,12 @@ var searchData= [ - ['ode_5fforward_5feuler_2ec_185',['ode_forward_euler.c',['../d4/d07/ode__forward__euler_8c.html',1,'']]], - ['ode_5fmidpoint_5feuler_2ec_186',['ode_midpoint_euler.c',['../d1/dc2/ode__midpoint__euler_8c.html',1,'']]], - ['ode_5fsemi_5fimplicit_5feuler_2ec_187',['ode_semi_implicit_euler.c',['../d4/d99/ode__semi__implicit__euler_8c.html',1,'']]], - ['ok_188',['OK',['../d5/df4/group__sudoku.html#ga3a0ec150ac9d0cb6b28279d36d95d72f',1,'sudoku_solver.c']]], - ['okbox_189',['OKbox',['../d5/df4/group__sudoku.html#ga1cd43df3f4187845ce186042fe53e6f1',1,'sudoku_solver.c']]], - ['okcol_190',['OKcol',['../d5/df4/group__sudoku.html#ga6503128d4f5ce0a0826f72f73f9e0b2a',1,'sudoku_solver.c']]], - ['okrow_191',['OKrow',['../d5/df4/group__sudoku.html#ga85d25d3b40017436f264a103685e4c55',1,'sudoku_solver.c']]], - ['order_192',['order',['../d4/d07/ode__forward__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_semi_implicit_euler.c']]] + ['observation_189',['observation',['../d1/d5e/structobservation.html',1,'']]], + ['ode_5fforward_5feuler_2ec_190',['ode_forward_euler.c',['../d4/d07/ode__forward__euler_8c.html',1,'']]], + ['ode_5fmidpoint_5feuler_2ec_191',['ode_midpoint_euler.c',['../d1/dc2/ode__midpoint__euler_8c.html',1,'']]], + ['ode_5fsemi_5fimplicit_5feuler_2ec_192',['ode_semi_implicit_euler.c',['../d4/d99/ode__semi__implicit__euler_8c.html',1,'']]], + ['ok_193',['OK',['../d5/df4/group__sudoku.html#ga3a0ec150ac9d0cb6b28279d36d95d72f',1,'sudoku_solver.c']]], + ['okbox_194',['OKbox',['../d5/df4/group__sudoku.html#ga1cd43df3f4187845ce186042fe53e6f1',1,'sudoku_solver.c']]], + ['okcol_195',['OKcol',['../d5/df4/group__sudoku.html#ga6503128d4f5ce0a0826f72f73f9e0b2a',1,'sudoku_solver.c']]], + ['okrow_196',['OKrow',['../d5/df4/group__sudoku.html#ga85d25d3b40017436f264a103685e4c55',1,'sudoku_solver.c']]], + ['order_197',['order',['../d4/d07/ode__forward__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_semi_implicit_euler.c']]] ]; diff --git a/search/classes_0.js b/search/classes_0.js index 3cc29bd4..6ddd1c61 100644 --- a/search/classes_0.js +++ b/search/classes_0.js @@ -1,6 +1,6 @@ var searchData= [ - ['_5fbig_5fint_289',['_big_int',['../dc/d77/struct__big__int.html',1,'']]], - ['_5fcantor_5fset_290',['_cantor_set',['../d9/dd7/struct__cantor__set.html',1,'']]], - ['_5flarge_5fnum_291',['_large_num',['../d3/d5a/struct__large__num.html',1,'']]] + ['_5fbig_5fint_296',['_big_int',['../dc/d77/struct__big__int.html',1,'']]], + ['_5fcantor_5fset_297',['_cantor_set',['../d9/dd7/struct__cantor__set.html',1,'']]], + ['_5flarge_5fnum_298',['_large_num',['../d3/d5a/struct__large__num.html',1,'']]] ]; diff --git a/search/classes_1.js b/search/classes_1.js index aa443001..b86abdff 100644 --- a/search/classes_1.js +++ b/search/classes_1.js @@ -1,5 +1,5 @@ var searchData= [ - ['adaline_292',['adaline',['../d2/daa/structadaline.html',1,'']]], - ['avlnode_293',['AVLnode',['../d2/d71/struct_a_v_lnode.html',1,'']]] + ['adaline_299',['adaline',['../d2/daa/structadaline.html',1,'']]], + ['avlnode_300',['AVLnode',['../d2/d71/struct_a_v_lnode.html',1,'']]] ]; diff --git a/search/classes_10.js b/search/classes_10.js index 0912c616..0bfdfe47 100644 --- a/search/classes_10.js +++ b/search/classes_10.js @@ -1,4 +1,6 @@ var searchData= [ - ['word_5fcount_5fword_318',['word_count_word',['../df/ddb/structword__count__word.html',1,'']]] + ['t_324',['T',['../d5/d7e/struct_t.html',1,'']]], + ['tnode_325',['tnode',['../d8/d7a/structtnode.html',1,'']]], + ['trienode_326',['TrieNode',['../da/d9b/struct_trie_node.html',1,'']]] ]; diff --git a/search/classes_11.html b/search/classes_11.html new file mode 100644 index 00000000..34286586 --- /dev/null +++ b/search/classes_11.html @@ -0,0 +1,36 @@ + +Loading...+ + +Searching...+No Matches+ ++ + + + + + + + ++ + diff --git a/search/classes_11.js b/search/classes_11.js new file mode 100644 index 00000000..7e561707 --- /dev/null +++ b/search/classes_11.js @@ -0,0 +1,4 @@ +var searchData= +[ + ['word_5fcount_5fword_327',['word_count_word',['../df/ddb/structword__count__word.html',1,'']]] +]; diff --git a/search/classes_2.js b/search/classes_2.js index ae52a5eb..0378b766 100644 --- a/search/classes_2.js +++ b/search/classes_2.js @@ -1,4 +1,4 @@ var searchData= [ - ['bstiterator_294',['BSTIterator',['../d4/d02/struct_b_s_t_iterator.html',1,'']]] + ['bstiterator_301',['BSTIterator',['../d4/d02/struct_b_s_t_iterator.html',1,'']]] ]; diff --git a/search/classes_3.js b/search/classes_3.js index 853c7c2f..2ba899d8 100644 --- a/search/classes_3.js +++ b/search/classes_3.js @@ -1,4 +1,5 @@ var searchData= [ - ['carray_295',['CArray',['../d4/d2d/struct_c_array.html',1,'']]] + ['carray_302',['CArray',['../d4/d2d/struct_c_array.html',1,'']]], + ['cluster_303',['cluster',['../d1/d99/structcluster.html',1,'']]] ]; diff --git a/search/classes_4.js b/search/classes_4.js index 52fe7a7f..3ad6082e 100644 --- a/search/classes_4.js +++ b/search/classes_4.js @@ -1,6 +1,6 @@ var searchData= [ - ['data_296',['data',['../df/dea/structdata.html',1,'']]], - ['dict_297',['Dict',['../d4/dfe/struct_dict.html',1,'']]], - ['dynamic_5farray_298',['dynamic_array',['../d6/d42/structdynamic__array.html',1,'']]] + ['data_304',['data',['../df/dea/structdata.html',1,'']]], + ['dict_305',['Dict',['../d4/dfe/struct_dict.html',1,'']]], + ['dynamic_5farray_306',['dynamic_array',['../d6/d42/structdynamic__array.html',1,'']]] ]; diff --git a/search/classes_5.js b/search/classes_5.js index b9b63bbb..a3ffcc5b 100644 --- a/search/classes_5.js +++ b/search/classes_5.js @@ -1,5 +1,5 @@ var searchData= [ - ['edge_299',['Edge',['../d5/db4/struct_edge.html',1,'']]], - ['elem_300',['elem',['../d0/d6b/structelem.html',1,'']]] + ['edge_307',['Edge',['../d5/db4/struct_edge.html',1,'']]], + ['elem_308',['elem',['../d0/d6b/structelem.html',1,'']]] ]; diff --git a/search/classes_6.js b/search/classes_6.js index 0b209228..0b830a86 100644 --- a/search/classes_6.js +++ b/search/classes_6.js @@ -1,5 +1,5 @@ var searchData= [ - ['graph_301',['Graph',['../d4/dd4/struct_graph.html',1,'']]], - ['graphrep_302',['GraphRep',['../d2/d6a/struct_graph_rep.html',1,'']]] + ['graph_309',['Graph',['../d4/dd4/struct_graph.html',1,'']]], + ['graphrep_310',['GraphRep',['../d2/d6a/struct_graph_rep.html',1,'']]] ]; diff --git a/search/classes_7.js b/search/classes_7.js index a246864b..5c304646 100644 --- a/search/classes_7.js +++ b/search/classes_7.js @@ -1,4 +1,4 @@ var searchData= [ - ['hash_5fset_5ft_303',['hash_set_t',['../d0/df1/structhash__set__t.html',1,'']]] + ['hash_5fset_5ft_311',['hash_set_t',['../d0/df1/structhash__set__t.html',1,'']]] ]; diff --git a/search/classes_8.js b/search/classes_8.js index d098e362..04ffb90a 100644 --- a/search/classes_8.js +++ b/search/classes_8.js @@ -1,4 +1,4 @@ var searchData= [ - ['kohonen_5farray_5f3d_304',['kohonen_array_3d',['../d8/db8/structkohonen__array__3d.html',1,'']]] + ['kohonen_5farray_5f3d_312',['kohonen_array_3d',['../d8/db8/structkohonen__array__3d.html',1,'']]] ]; diff --git a/search/classes_9.js b/search/classes_9.js index e37e48bf..6be29067 100644 --- a/search/classes_9.js +++ b/search/classes_9.js @@ -1,4 +1,4 @@ var searchData= [ - ['l_305',['L',['../df/db3/struct_l.html',1,'']]] + ['l_313',['L',['../df/db3/struct_l.html',1,'']]] ]; diff --git a/search/classes_a.js b/search/classes_a.js index 5d0a855c..14bcd965 100644 --- a/search/classes_a.js +++ b/search/classes_a.js @@ -1,5 +1,5 @@ var searchData= [ - ['max_5fheap_306',['max_heap',['../d0/d8a/structmax__heap.html',1,'']]], - ['min_5fheap_307',['min_heap',['../de/dce/structmin__heap.html',1,'']]] + ['max_5fheap_314',['max_heap',['../d0/d8a/structmax__heap.html',1,'']]], + ['min_5fheap_315',['min_heap',['../de/dce/structmin__heap.html',1,'']]] ]; diff --git a/search/classes_b.js b/search/classes_b.js index a6e065a1..9272841e 100644 --- a/search/classes_b.js +++ b/search/classes_b.js @@ -1,4 +1,4 @@ var searchData= [ - ['node_308',['Node',['../db/d8b/struct_node.html',1,'Node'],['../d5/da1/structnode.html',1,'node']]] + ['node_316',['Node',['../db/d8b/struct_node.html',1,'Node'],['../d5/da1/structnode.html',1,'node']]] ]; diff --git a/search/classes_c.js b/search/classes_c.js index d83fbcbc..1b360968 100644 --- a/search/classes_c.js +++ b/search/classes_c.js @@ -1,4 +1,4 @@ var searchData= [ - ['pid_309',['pid',['../d0/d43/structpid.html',1,'']]] + ['observation_317',['observation',['../d1/d5e/structobservation.html',1,'']]] ]; diff --git a/search/classes_d.js b/search/classes_d.js index 54ee1679..821cbad7 100644 --- a/search/classes_d.js +++ b/search/classes_d.js @@ -1,5 +1,4 @@ var searchData= [ - ['queue_310',['queue',['../d2/d36/structqueue.html',1,'']]], - ['queuerep_311',['QueueRep',['../d0/d10/struct_queue_rep.html',1,'']]] + ['pid_318',['pid',['../d0/d43/structpid.html',1,'']]] ]; diff --git a/search/classes_e.js b/search/classes_e.js index 8a4eba5f..537af414 100644 --- a/search/classes_e.js +++ b/search/classes_e.js @@ -1,6 +1,5 @@ var searchData= [ - ['stack_312',['Stack',['../dd/d10/struct_stack.html',1,'']]], - ['subset_313',['subset',['../dc/de5/structsubset.html',1,'']]], - ['sudoku_314',['sudoku',['../dc/d18/structsudoku.html',1,'']]] + ['queue_319',['queue',['../d2/d36/structqueue.html',1,'']]], + ['queuerep_320',['QueueRep',['../d0/d10/struct_queue_rep.html',1,'']]] ]; diff --git a/search/classes_f.js b/search/classes_f.js index 9b4a8a5c..aa6bc219 100644 --- a/search/classes_f.js +++ b/search/classes_f.js @@ -1,6 +1,6 @@ var searchData= [ - ['t_315',['T',['../d5/d7e/struct_t.html',1,'']]], - ['tnode_316',['tnode',['../d8/d7a/structtnode.html',1,'']]], - ['trienode_317',['TrieNode',['../da/d9b/struct_trie_node.html',1,'']]] + ['stack_321',['Stack',['../dd/d10/struct_stack.html',1,'']]], + ['subset_322',['subset',['../dc/de5/structsubset.html',1,'']]], + ['sudoku_323',['sudoku',['../dc/d18/structsudoku.html',1,'']]] ]; diff --git a/search/defines_0.js b/search/defines_0.js index f6c7c059..11a19720 100644 --- a/search/defines_0.js +++ b/search/defines_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['_5fuse_5fmath_5fdefines_544',['_USE_MATH_DEFINES',['../d7/d98/spirograph_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): spirograph.c'],['../d2/df6/kohonen__som__topology_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): kohonen_som_trace.c'],['../d6/d2e/cartesian__to__polar_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): cartesian_to_polar.c']]] + ['_5fuse_5fmath_5fdefines_557',['_USE_MATH_DEFINES',['../d7/d98/spirograph_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): spirograph.c'],['../d2/df6/kohonen__som__topology_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): kohonen_som_trace.c'],['../d6/d2e/cartesian__to__polar_8c.html#a525335710b53cb064ca56b936120431e',1,'_USE_MATH_DEFINES(): cartesian_to_polar.c']]] ]; diff --git a/search/defines_1.js b/search/defines_1.js index a36c69cb..e45bac1b 100644 --- a/search/defines_1.js +++ b/search/defines_1.js @@ -1,4 +1,4 @@ var searchData= [ - ['accuracy_545',['ACCURACY',['../da/d38/durand__kerner__roots_8c.html#af270a96662132d0385cb6b4637c5a689',1,'ACCURACY(): durand_kerner_roots.c'],['../dd/d08/newton__raphson__root_8c.html#af270a96662132d0385cb6b4637c5a689',1,'ACCURACY(): newton_raphson_root.c']]] + ['accuracy_558',['ACCURACY',['../da/d38/durand__kerner__roots_8c.html#af270a96662132d0385cb6b4637c5a689',1,'ACCURACY(): durand_kerner_roots.c'],['../dd/d08/newton__raphson__root_8c.html#af270a96662132d0385cb6b4637c5a689',1,'ACCURACY(): newton_raphson_root.c']]] ]; diff --git a/search/defines_2.js b/search/defines_2.js index 5bd84231..1635bf67 100644 --- a/search/defines_2.js +++ b/search/defines_2.js @@ -1,4 +1,4 @@ var searchData= [ - ['epsilon_546',['EPSILON',['../d7/d50/qr__eigen__values_8c.html#a002b2f4894492820fe708b1b7e7c5e70',1,'qr_eigen_values.c']]] + ['epsilon_559',['EPSILON',['../d7/d50/qr__eigen__values_8c.html#a002b2f4894492820fe708b1b7e7c5e70',1,'qr_eigen_values.c']]] ]; diff --git a/search/defines_3.js b/search/defines_3.js index c37f22da..0c34fc30 100644 --- a/search/defines_3.js +++ b/search/defines_3.js @@ -1,4 +1,4 @@ var searchData= [ - ['lims_547',['LIMS',['../d7/d50/qr__eigen__values_8c.html#aee57a411f07599034f5ceb8cc7d65b40',1,'qr_eigen_values.c']]] + ['lims_560',['LIMS',['../d7/d50/qr__eigen__values_8c.html#aee57a411f07599034f5ceb8cc7d65b40',1,'qr_eigen_values.c']]] ]; diff --git a/search/defines_4.js b/search/defines_4.js index 4f469bdb..1a45b0f9 100644 --- a/search/defines_4.js +++ b/search/defines_4.js @@ -1,14 +1,14 @@ var searchData= [ - ['max_548',['MAX',['../dd/d93/client_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): client.c'],['../d1/d20/server_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): server.c']]], - ['max_5fdeno_549',['MAX_DENO',['../d1/df9/problem__26_2sol1_8c.html#a619eec3220cebd7c5e455edbb14e9b12',1,'sol1.c']]], - ['max_5fdigits_550',['MAX_DIGITS',['../d8/d32/problem__25_2sol1_8c.html#a001791a21d538b8b9176287ae60d9b61',1,'sol1.c']]], - ['max_5flen_551',['MAX_LEN',['../d1/df9/problem__26_2sol1_8c.html#aabf4f709c8199e41cf279c77112345fe',1,'sol1.c']]], - ['max_5flength_552',['MAX_LENGTH',['../d4/d83/problem__401_2sol1_8c.html#a7a9a231e30b47bc0345749c8bd1e5077',1,'sol1.c']]], - ['max_5fname_5flen_553',['MAX_NAME_LEN',['../dd/d8b/problem__22_2sol1_8c.html#afd709f201d7643c3909621f620ea648a',1,'sol1.c']]], - ['max_5fnames_554',['MAX_NAMES',['../dd/d8b/problem__22_2sol1_8c.html#a6cb9b08aacb61416795ee78bfceacd38',1,'sol1.c']]], - ['max_5fsize_555',['MAX_SIZE',['../df/df3/union__find_8c.html#a0592dba56693fad79136250c11e5a7fe',1,'union_find.c']]], - ['maxline_556',['MAXLINE',['../da/de6/udp__client_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_client.c'],['../d8/dca/udp__server_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_server.c']]], - ['min_557',['min',['../d6/d7b/jump__search_8c.html#a8195a86b6d75b9a3939505e8bb50021e',1,'jump_search.c']]], - ['mod_5flimit_558',['MOD_LIMIT',['../d4/d83/problem__401_2sol1_8c.html#ade1bdf2529e3c58f53bfb4d844f3a9d3',1,'sol1.c']]] + ['max_561',['MAX',['../dd/d93/client_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): client.c'],['../d1/d20/server_8c.html#a392fb874e547e582e9c66a08a1f23326',1,'MAX(): server.c']]], + ['max_5fdeno_562',['MAX_DENO',['../d1/df9/problem__26_2sol1_8c.html#a619eec3220cebd7c5e455edbb14e9b12',1,'sol1.c']]], + ['max_5fdigits_563',['MAX_DIGITS',['../d8/d32/problem__25_2sol1_8c.html#a001791a21d538b8b9176287ae60d9b61',1,'sol1.c']]], + ['max_5flen_564',['MAX_LEN',['../d1/df9/problem__26_2sol1_8c.html#aabf4f709c8199e41cf279c77112345fe',1,'sol1.c']]], + ['max_5flength_565',['MAX_LENGTH',['../d4/d83/problem__401_2sol1_8c.html#a7a9a231e30b47bc0345749c8bd1e5077',1,'sol1.c']]], + ['max_5fname_5flen_566',['MAX_NAME_LEN',['../dd/d8b/problem__22_2sol1_8c.html#afd709f201d7643c3909621f620ea648a',1,'sol1.c']]], + ['max_5fnames_567',['MAX_NAMES',['../dd/d8b/problem__22_2sol1_8c.html#a6cb9b08aacb61416795ee78bfceacd38',1,'sol1.c']]], + ['max_5fsize_568',['MAX_SIZE',['../df/df3/union__find_8c.html#a0592dba56693fad79136250c11e5a7fe',1,'union_find.c']]], + ['maxline_569',['MAXLINE',['../da/de6/udp__client_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_client.c'],['../d8/dca/udp__server_8c.html#a3e937c42922f7601edb17b747602c471',1,'MAXLINE(): udp_server.c']]], + ['min_570',['min',['../d6/d7b/jump__search_8c.html#a8195a86b6d75b9a3939505e8bb50021e',1,'jump_search.c']]], + ['mod_5flimit_571',['MOD_LIMIT',['../d4/d83/problem__401_2sol1_8c.html#ade1bdf2529e3c58f53bfb4d844f3a9d3',1,'sol1.c']]] ]; diff --git a/search/defines_5.js b/search/defines_5.js index b527ffd2..0bbf2fea 100644 --- a/search/defines_5.js +++ b/search/defines_5.js @@ -1,4 +1,4 @@ var searchData= [ - ['order_559',['order',['../d4/d07/ode__forward__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_semi_implicit_euler.c']]] + ['order_572',['order',['../d4/d07/ode__forward__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a9ceb646336224ee890a269d0b4600d09',1,'order(): ode_semi_implicit_euler.c']]] ]; diff --git a/search/defines_6.js b/search/defines_6.js index 3d1a2ec9..b5998fce 100644 --- a/search/defines_6.js +++ b/search/defines_6.js @@ -1,4 +1,4 @@ var searchData= [ - ['port_560',['PORT',['../dd/d93/client_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): client.c'],['../d1/d20/server_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): server.c'],['../da/de6/udp__client_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): udp_client.c'],['../d8/dca/udp__server_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): udp_server.c']]] + ['port_573',['PORT',['../dd/d93/client_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): client.c'],['../d1/d20/server_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): server.c'],['../da/de6/udp__client_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): udp_client.c'],['../d8/dca/udp__server_8c.html#a614217d263be1fb1a5f76e2ff7be19a2',1,'PORT(): udp_server.c']]] ]; diff --git a/search/defines_7.js b/search/defines_7.js index 3509b347..147692e0 100644 --- a/search/defines_7.js +++ b/search/defines_7.js @@ -1,4 +1,4 @@ var searchData= [ - ['sa_561',['SA',['../dd/d93/client_8c.html#a1e43924adac4ae865aa0acf79710261c',1,'SA(): client.c'],['../d1/d20/server_8c.html#a1e43924adac4ae865aa0acf79710261c',1,'SA(): server.c']]] + ['sa_574',['SA',['../dd/d93/client_8c.html#a1e43924adac4ae865aa0acf79710261c',1,'SA(): client.c'],['../d1/d20/server_8c.html#a1e43924adac4ae865aa0acf79710261c',1,'SA(): server.c']]] ]; diff --git a/search/files_0.js b/search/files_0.js index 4cea0a91..a2a45f81 100644 --- a/search/files_0.js +++ b/search/files_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['adaline_5flearning_2ec_319',['adaline_learning.c',['../dd/d8c/adaline__learning_8c.html',1,'']]] + ['adaline_5flearning_2ec_328',['adaline_learning.c',['../dd/d8c/adaline__learning_8c.html',1,'']]] ]; diff --git a/search/files_1.js b/search/files_1.js index 096a2f43..62560024 100644 --- a/search/files_1.js +++ b/search/files_1.js @@ -1,8 +1,8 @@ var searchData= [ - ['bead_5fsort_2ec_320',['bead_sort.c',['../d2/da8/bead__sort_8c.html',1,'']]], - ['binary_5fsearch_2ec_321',['binary_search.c',['../df/d3b/binary__search_8c.html',1,'']]], - ['binary_5fsearch_5ftree_2ec_322',['binary_search_tree.c',['../da/d02/binary__search__tree_8c.html',1,'']]], - ['bubble_5fsort_2ec_323',['bubble_sort.c',['../dd/de4/bubble__sort_8c.html',1,'']]], - ['bubble_5fsort_5frecursion_2ec_324',['bubble_sort_recursion.c',['../d5/d38/bubble__sort__recursion_8c.html',1,'']]] + ['bead_5fsort_2ec_329',['bead_sort.c',['../d2/da8/bead__sort_8c.html',1,'']]], + ['binary_5fsearch_2ec_330',['binary_search.c',['../df/d3b/binary__search_8c.html',1,'']]], + ['binary_5fsearch_5ftree_2ec_331',['binary_search_tree.c',['../da/d02/binary__search__tree_8c.html',1,'']]], + ['bubble_5fsort_2ec_332',['bubble_sort.c',['../dd/de4/bubble__sort_8c.html',1,'']]], + ['bubble_5fsort_5frecursion_2ec_333',['bubble_sort_recursion.c',['../d5/d38/bubble__sort__recursion_8c.html',1,'']]] ]; diff --git a/search/files_10.js b/search/files_10.js index 8ada065a..93949f69 100644 --- a/search/files_10.js +++ b/search/files_10.js @@ -1,14 +1,14 @@ var searchData= [ - ['selection_5fsort_2ec_356',['selection_sort.c',['../df/d83/selection__sort_8c.html',1,'']]], - ['server_2ec_357',['server.c',['../d1/d20/server_8c.html',1,'']]], - ['shell_5fsort2_2ec_358',['shell_sort2.c',['../d6/ded/shell__sort2_8c.html',1,'']]], - ['so1_2ec_359',['so1.c',['../d0/d7f/so1_8c.html',1,'']]], - ['sol_2ec_360',['sol.c',['../d0/d6c/problem__4_2sol_8c.html',1,'(Global Namespace)'],['../df/de7/problem__5_2sol_8c.html',1,'(Global Namespace)'],['../d4/d7b/problem__6_2sol_8c.html',1,'(Global Namespace)'],['../d1/d2f/problem__7_2sol_8c.html',1,'(Global Namespace)']]], - ['sol1_2ec_361',['sol1.c',['../da/d35/problem__1_2sol1_8c.html',1,'(Global Namespace)'],['../d0/d6d/problem__10_2sol1_8c.html',1,'(Global Namespace)'],['../d7/d1f/problem__12_2sol1_8c.html',1,'(Global Namespace)'],['../db/d01/problem__13_2sol1_8c.html',1,'(Global Namespace)'],['../d4/dea/problem__14_2sol1_8c.html',1,'(Global Namespace)'],['../d7/d91/problem__15_2sol1_8c.html',1,'(Global Namespace)'],['../d6/d88/problem__16_2sol1_8c.html',1,'(Global Namespace)'],['../dd/df0/problem__19_2sol1_8c.html',1,'(Global Namespace)'],['../db/d80/problem__20_2sol1_8c.html',1,'(Global Namespace)'],['../df/d1a/problem__21_2sol1_8c.html',1,'(Global Namespace)'],['../dd/d8b/problem__22_2sol1_8c.html',1,'(Global Namespace)'],['../d7/ddb/problem__23_2sol1_8c.html',1,'(Global Namespace)'],['../d8/d32/problem__25_2sol1_8c.html',1,'(Global Namespace)'],['../d1/df9/problem__26_2sol1_8c.html',1,'(Global Namespace)'],['../d7/dd3/problem__3_2sol1_8c.html',1,'(Global Namespace)'],['../d4/d83/problem__401_2sol1_8c.html',1,'(Global Namespace)'],['../dc/d63/problem__8_2sol1_8c.html',1,'(Global Namespace)'],['../df/da5/problem__9_2sol1_8c.html',1,'(Global Namespace)']]], - ['sol2_2ec_362',['sol2.c',['../d2/dae/problem__1_2sol2_8c.html',1,'(Global Namespace)'],['../d9/da7/problem__10_2sol2_8c.html',1,'(Global Namespace)'],['../d4/dbd/problem__23_2sol2_8c.html',1,'(Global Namespace)'],['../d2/dbc/problem__3_2sol2_8c.html',1,'(Global Namespace)'],['../d2/d93/problem__8_2sol2_8c.html',1,'(Global Namespace)'],['../d8/de0/problem__9_2sol2_8c.html',1,'(Global Namespace)']]], - ['sol3_2ec_363',['sol3.c',['../d6/de3/sol3_8c.html',1,'']]], - ['sol4_2ec_364',['sol4.c',['../d6/d1b/sol4_8c.html',1,'']]], - ['spirograph_2ec_365',['spirograph.c',['../d7/d98/spirograph_8c.html',1,'']]], - ['sudoku_5fsolver_2ec_366',['sudoku_solver.c',['../de/dac/sudoku__solver_8c.html',1,'']]] + ['selection_5fsort_2ec_365',['selection_sort.c',['../df/d83/selection__sort_8c.html',1,'']]], + ['server_2ec_366',['server.c',['../d1/d20/server_8c.html',1,'']]], + ['shell_5fsort2_2ec_367',['shell_sort2.c',['../d6/ded/shell__sort2_8c.html',1,'']]], + ['so1_2ec_368',['so1.c',['../d0/d7f/so1_8c.html',1,'']]], + ['sol_2ec_369',['sol.c',['../d0/d6c/problem__4_2sol_8c.html',1,'(Global Namespace)'],['../df/de7/problem__5_2sol_8c.html',1,'(Global Namespace)'],['../d4/d7b/problem__6_2sol_8c.html',1,'(Global Namespace)'],['../d1/d2f/problem__7_2sol_8c.html',1,'(Global Namespace)']]], + ['sol1_2ec_370',['sol1.c',['../da/d35/problem__1_2sol1_8c.html',1,'(Global Namespace)'],['../d0/d6d/problem__10_2sol1_8c.html',1,'(Global Namespace)'],['../d7/d1f/problem__12_2sol1_8c.html',1,'(Global Namespace)'],['../db/d01/problem__13_2sol1_8c.html',1,'(Global Namespace)'],['../d4/dea/problem__14_2sol1_8c.html',1,'(Global Namespace)'],['../d7/d91/problem__15_2sol1_8c.html',1,'(Global Namespace)'],['../d6/d88/problem__16_2sol1_8c.html',1,'(Global Namespace)'],['../dd/df0/problem__19_2sol1_8c.html',1,'(Global Namespace)'],['../db/d80/problem__20_2sol1_8c.html',1,'(Global Namespace)'],['../df/d1a/problem__21_2sol1_8c.html',1,'(Global Namespace)'],['../dd/d8b/problem__22_2sol1_8c.html',1,'(Global Namespace)'],['../d7/ddb/problem__23_2sol1_8c.html',1,'(Global Namespace)'],['../d8/d32/problem__25_2sol1_8c.html',1,'(Global Namespace)'],['../d1/df9/problem__26_2sol1_8c.html',1,'(Global Namespace)'],['../d7/dd3/problem__3_2sol1_8c.html',1,'(Global Namespace)'],['../d4/d83/problem__401_2sol1_8c.html',1,'(Global Namespace)'],['../dc/d63/problem__8_2sol1_8c.html',1,'(Global Namespace)'],['../df/da5/problem__9_2sol1_8c.html',1,'(Global Namespace)']]], + ['sol2_2ec_371',['sol2.c',['../d2/dae/problem__1_2sol2_8c.html',1,'(Global Namespace)'],['../d9/da7/problem__10_2sol2_8c.html',1,'(Global Namespace)'],['../d4/dbd/problem__23_2sol2_8c.html',1,'(Global Namespace)'],['../d2/dbc/problem__3_2sol2_8c.html',1,'(Global Namespace)'],['../d2/d93/problem__8_2sol2_8c.html',1,'(Global Namespace)'],['../d8/de0/problem__9_2sol2_8c.html',1,'(Global Namespace)']]], + ['sol3_2ec_372',['sol3.c',['../d6/de3/sol3_8c.html',1,'']]], + ['sol4_2ec_373',['sol4.c',['../d6/d1b/sol4_8c.html',1,'']]], + ['spirograph_2ec_374',['spirograph.c',['../d7/d98/spirograph_8c.html',1,'']]], + ['sudoku_5fsolver_2ec_375',['sudoku_solver.c',['../de/dac/sudoku__solver_8c.html',1,'']]] ]; diff --git a/search/files_11.js b/search/files_11.js index 23be8044..056d2629 100644 --- a/search/files_11.js +++ b/search/files_11.js @@ -1,4 +1,4 @@ var searchData= [ - ['threaded_5fbinary_5ftrees_2ec_367',['threaded_binary_trees.c',['../df/d3c/threaded__binary__trees_8c.html',1,'']]] + ['threaded_5fbinary_5ftrees_2ec_376',['threaded_binary_trees.c',['../df/d3c/threaded__binary__trees_8c.html',1,'']]] ]; diff --git a/search/files_12.js b/search/files_12.js index 034e7765..534fc6e9 100644 --- a/search/files_12.js +++ b/search/files_12.js @@ -1,6 +1,6 @@ var searchData= [ - ['udp_5fclient_2ec_368',['udp_client.c',['../da/de6/udp__client_8c.html',1,'']]], - ['udp_5fserver_2ec_369',['udp_server.c',['../d8/dca/udp__server_8c.html',1,'']]], - ['union_5ffind_2ec_370',['union_find.c',['../df/df3/union__find_8c.html',1,'']]] + ['udp_5fclient_2ec_377',['udp_client.c',['../da/de6/udp__client_8c.html',1,'']]], + ['udp_5fserver_2ec_378',['udp_server.c',['../d8/dca/udp__server_8c.html',1,'']]], + ['union_5ffind_2ec_379',['union_find.c',['../df/df3/union__find_8c.html',1,'']]] ]; diff --git a/search/files_2.js b/search/files_2.js index d92e8083..0ca19f15 100644 --- a/search/files_2.js +++ b/search/files_2.js @@ -1,8 +1,8 @@ var searchData= [ - ['c_5fatoi_5fstr_5fto_5finteger_2ec_325',['c_atoi_str_to_integer.c',['../d7/dd8/c__atoi__str__to__integer_8c.html',1,'']]], - ['cantor_5fset_2ec_326',['cantor_set.c',['../dc/d80/cantor__set_8c.html',1,'']]], - ['cartesian_5fto_5fpolar_2ec_327',['cartesian_to_polar.c',['../d6/d2e/cartesian__to__polar_8c.html',1,'']]], - ['client_2ec_328',['client.c',['../dd/d93/client_8c.html',1,'']]], - ['collatz_2ec_329',['collatz.c',['../dc/d80/collatz_8c.html',1,'']]] + ['c_5fatoi_5fstr_5fto_5finteger_2ec_334',['c_atoi_str_to_integer.c',['../d7/dd8/c__atoi__str__to__integer_8c.html',1,'']]], + ['cantor_5fset_2ec_335',['cantor_set.c',['../dc/d80/cantor__set_8c.html',1,'']]], + ['cartesian_5fto_5fpolar_2ec_336',['cartesian_to_polar.c',['../d6/d2e/cartesian__to__polar_8c.html',1,'']]], + ['client_2ec_337',['client.c',['../dd/d93/client_8c.html',1,'']]], + ['collatz_2ec_338',['collatz.c',['../dc/d80/collatz_8c.html',1,'']]] ]; diff --git a/search/files_3.js b/search/files_3.js index ca1cc036..29b20d37 100644 --- a/search/files_3.js +++ b/search/files_3.js @@ -1,5 +1,5 @@ var searchData= [ - ['decimal_5fto_5fbinary_5frecursion_2ec_330',['decimal_to_binary_recursion.c',['../d8/d30/decimal__to__binary__recursion_8c.html',1,'']]], - ['durand_5fkerner_5froots_2ec_331',['durand_kerner_roots.c',['../da/d38/durand__kerner__roots_8c.html',1,'']]] + ['decimal_5fto_5fbinary_5frecursion_2ec_339',['decimal_to_binary_recursion.c',['../d8/d30/decimal__to__binary__recursion_8c.html',1,'']]], + ['durand_5fkerner_5froots_2ec_340',['durand_kerner_roots.c',['../da/d38/durand__kerner__roots_8c.html',1,'']]] ]; diff --git a/search/files_4.js b/search/files_4.js index 7f392e5d..40bde748 100644 --- a/search/files_4.js +++ b/search/files_4.js @@ -1,5 +1,5 @@ var searchData= [ - ['factorial_5flarge_5fnumber_2ec_332',['factorial_large_number.c',['../d6/d3d/factorial__large__number_8c.html',1,'']]], - ['fibonacci_5ffast_2ec_333',['fibonacci_fast.c',['../d4/d99/fibonacci__fast_8c.html',1,'']]] + ['factorial_5flarge_5fnumber_2ec_341',['factorial_large_number.c',['../d6/d3d/factorial__large__number_8c.html',1,'']]], + ['fibonacci_5ffast_2ec_342',['fibonacci_fast.c',['../d4/d99/fibonacci__fast_8c.html',1,'']]] ]; diff --git a/search/files_5.js b/search/files_5.js index 153e173c..1b880b53 100644 --- a/search/files_5.js +++ b/search/files_5.js @@ -1,8 +1,8 @@ var searchData= [ - ['hash_5fadler32_2ec_334',['hash_adler32.c',['../d3/d39/hash__adler32_8c.html',1,'']]], - ['hash_5fcrc32_2ec_335',['hash_crc32.c',['../d9/dc9/hash__crc32_8c.html',1,'']]], - ['hash_5fdjb2_2ec_336',['hash_djb2.c',['../d4/de3/hash__djb2_8c.html',1,'']]], - ['hash_5fsdbm_2ec_337',['hash_sdbm.c',['../d7/d0c/hash__sdbm_8c.html',1,'']]], - ['hash_5fxor8_2ec_338',['hash_xor8.c',['../d0/d57/hash__xor8_8c.html',1,'']]] + ['hash_5fadler32_2ec_343',['hash_adler32.c',['../d3/d39/hash__adler32_8c.html',1,'']]], + ['hash_5fcrc32_2ec_344',['hash_crc32.c',['../d9/dc9/hash__crc32_8c.html',1,'']]], + ['hash_5fdjb2_2ec_345',['hash_djb2.c',['../d4/de3/hash__djb2_8c.html',1,'']]], + ['hash_5fsdbm_2ec_346',['hash_sdbm.c',['../d7/d0c/hash__sdbm_8c.html',1,'']]], + ['hash_5fxor8_2ec_347',['hash_xor8.c',['../d0/d57/hash__xor8_8c.html',1,'']]] ]; diff --git a/search/files_6.js b/search/files_6.js index da4c8fd7..c972c7ff 100644 --- a/search/files_6.js +++ b/search/files_6.js @@ -1,5 +1,5 @@ var searchData= [ - ['insertion_5fsort_2ec_339',['insertion_sort.c',['../db/ddf/insertion__sort_8c.html',1,'']]], - ['int_5fto_5fstring_2ec_340',['int_to_string.c',['../dd/d53/int__to__string_8c.html',1,'']]] + ['insertion_5fsort_2ec_348',['insertion_sort.c',['../db/ddf/insertion__sort_8c.html',1,'']]], + ['int_5fto_5fstring_2ec_349',['int_to_string.c',['../dd/d53/int__to__string_8c.html',1,'']]] ]; diff --git a/search/files_7.js b/search/files_7.js index 2e9da106..0cee8127 100644 --- a/search/files_7.js +++ b/search/files_7.js @@ -1,4 +1,4 @@ var searchData= [ - ['jump_5fsearch_2ec_341',['jump_search.c',['../d6/d7b/jump__search_8c.html',1,'']]] + ['jump_5fsearch_2ec_350',['jump_search.c',['../d6/d7b/jump__search_8c.html',1,'']]] ]; diff --git a/search/files_8.js b/search/files_8.js index 6cb5d43a..1d6897a4 100644 --- a/search/files_8.js +++ b/search/files_8.js @@ -1,5 +1,5 @@ var searchData= [ - ['kohonen_5fsom_5ftopology_2ec_342',['kohonen_som_topology.c',['../d2/df6/kohonen__som__topology_8c.html',1,'']]], - ['kohonen_5fsom_5ftrace_2ec_343',['kohonen_som_trace.c',['../d0/d46/kohonen__som__trace_8c.html',1,'']]] + ['kohonen_5fsom_5ftopology_2ec_351',['kohonen_som_topology.c',['../d2/df6/kohonen__som__topology_8c.html',1,'']]], + ['kohonen_5fsom_5ftrace_2ec_352',['kohonen_som_trace.c',['../d0/d46/kohonen__som__trace_8c.html',1,'']]] ]; diff --git a/search/files_9.js b/search/files_9.js index 6196a7c6..87fdd4a9 100644 --- a/search/files_9.js +++ b/search/files_9.js @@ -1,4 +1,4 @@ var searchData= [ - ['lu_5fdecompose_2ec_344',['lu_decompose.c',['../dc/d2e/lu__decompose_8c.html',1,'']]] + ['lu_5fdecompose_2ec_353',['lu_decompose.c',['../dc/d2e/lu__decompose_8c.html',1,'']]] ]; diff --git a/search/files_a.js b/search/files_a.js index 72cfc343..274d01c4 100644 --- a/search/files_a.js +++ b/search/files_a.js @@ -1,5 +1,5 @@ var searchData= [ - ['merge_5fsort_2ec_345',['merge_sort.c',['../d2/d83/merge__sort_8c.html',1,'']]], - ['modified_5fbinary_5fsearch_2ec_346',['modified_binary_search.c',['../d3/d47/modified__binary__search_8c.html',1,'']]] + ['merge_5fsort_2ec_354',['merge_sort.c',['../d2/d83/merge__sort_8c.html',1,'']]], + ['modified_5fbinary_5fsearch_2ec_355',['modified_binary_search.c',['../d3/d47/modified__binary__search_8c.html',1,'']]] ]; diff --git a/search/files_b.js b/search/files_b.js index 12fefd42..b518bd41 100644 --- a/search/files_b.js +++ b/search/files_b.js @@ -1,4 +1,4 @@ var searchData= [ - ['newton_5fraphson_5froot_2ec_347',['newton_raphson_root.c',['../dd/d08/newton__raphson__root_8c.html',1,'']]] + ['newton_5fraphson_5froot_2ec_356',['newton_raphson_root.c',['../dd/d08/newton__raphson__root_8c.html',1,'']]] ]; diff --git a/search/files_c.js b/search/files_c.js index 2f9c16e3..38527138 100644 --- a/search/files_c.js +++ b/search/files_c.js @@ -1,6 +1,6 @@ var searchData= [ - ['ode_5fforward_5feuler_2ec_348',['ode_forward_euler.c',['../d4/d07/ode__forward__euler_8c.html',1,'']]], - ['ode_5fmidpoint_5feuler_2ec_349',['ode_midpoint_euler.c',['../d1/dc2/ode__midpoint__euler_8c.html',1,'']]], - ['ode_5fsemi_5fimplicit_5feuler_2ec_350',['ode_semi_implicit_euler.c',['../d4/d99/ode__semi__implicit__euler_8c.html',1,'']]] + ['ode_5fforward_5feuler_2ec_357',['ode_forward_euler.c',['../d4/d07/ode__forward__euler_8c.html',1,'']]], + ['ode_5fmidpoint_5feuler_2ec_358',['ode_midpoint_euler.c',['../d1/dc2/ode__midpoint__euler_8c.html',1,'']]], + ['ode_5fsemi_5fimplicit_5feuler_2ec_359',['ode_semi_implicit_euler.c',['../d4/d99/ode__semi__implicit__euler_8c.html',1,'']]] ]; diff --git a/search/files_d.js b/search/files_d.js index c95b0c46..9fde9875 100644 --- a/search/files_d.js +++ b/search/files_d.js @@ -1,4 +1,4 @@ var searchData= [ - ['palindrome_2ec_351',['palindrome.c',['../df/d16/palindrome_8c.html',1,'']]] + ['palindrome_2ec_360',['palindrome.c',['../df/d16/palindrome_8c.html',1,'']]] ]; diff --git a/search/files_e.js b/search/files_e.js index a3f10a40..def08ca0 100644 --- a/search/files_e.js +++ b/search/files_e.js @@ -1,6 +1,6 @@ var searchData= [ - ['qr_5fdecompose_2eh_352',['qr_decompose.h',['../d4/d68/qr__decompose_8h.html',1,'']]], - ['qr_5fdecomposition_2ec_353',['qr_decomposition.c',['../d5/d23/qr__decomposition_8c.html',1,'']]], - ['qr_5feigen_5fvalues_2ec_354',['qr_eigen_values.c',['../d7/d50/qr__eigen__values_8c.html',1,'']]] + ['qr_5fdecompose_2eh_361',['qr_decompose.h',['../d4/d68/qr__decompose_8h.html',1,'']]], + ['qr_5fdecomposition_2ec_362',['qr_decomposition.c',['../d5/d23/qr__decomposition_8c.html',1,'']]], + ['qr_5feigen_5fvalues_2ec_363',['qr_eigen_values.c',['../d7/d50/qr__eigen__values_8c.html',1,'']]] ]; diff --git a/search/files_f.js b/search/files_f.js index a522de9f..ed5e7dd6 100644 --- a/search/files_f.js +++ b/search/files_f.js @@ -1,4 +1,4 @@ var searchData= [ - ['realtime_5fstats_2ec_355',['realtime_stats.c',['../dc/d47/realtime__stats_8c.html',1,'']]] + ['realtime_5fstats_2ec_364',['realtime_stats.c',['../dc/d47/realtime__stats_8c.html',1,'']]] ]; diff --git a/search/functions_0.js b/search/functions_0.js index 4c449d97..9e8598cb 100644 --- a/search/functions_0.js +++ b/search/functions_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['_5frandom_371',['_random',['../d1/d6b/group__kohonen__2d.html#gaf5ce14f026d6d231bef29161bac2b485',1,'_random(double a, double b): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gaf5ce14f026d6d231bef29161bac2b485',1,'_random(double a, double b): kohonen_som_trace.c']]] + ['_5frandom_380',['_random',['../d1/d6b/group__kohonen__2d.html#gaf5ce14f026d6d231bef29161bac2b485',1,'_random(double a, double b): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gaf5ce14f026d6d231bef29161bac2b485',1,'_random(double a, double b): kohonen_som_trace.c']]] ]; diff --git a/search/functions_1.js b/search/functions_1.js index 3a200dab..e349d3f4 100644 --- a/search/functions_1.js +++ b/search/functions_1.js @@ -1,11 +1,11 @@ var searchData= [ - ['adaline_5factivation_372',['adaline_activation',['../da/d2a/group__adaline.html#ga43576566b020c4157d4fb28f0dd45cfa',1,'adaline_learning.c']]], - ['adaline_5ffit_373',['adaline_fit',['../da/d2a/group__adaline.html#gaa52120912e32d2893fe1c6d78da5befd',1,'adaline_learning.c']]], - ['adaline_5ffit_5fsample_374',['adaline_fit_sample',['../da/d2a/group__adaline.html#ga20d3642e0a87f36fdb7bf91b023cd166',1,'adaline_learning.c']]], - ['adaline_5fget_5fweights_5fstr_375',['adaline_get_weights_str',['../da/d2a/group__adaline.html#ga251695a79baa885cafdcf6d8ed4ac120',1,'adaline_learning.c']]], - ['adaline_5fpredict_376',['adaline_predict',['../da/d2a/group__adaline.html#gac70b578aee679005fd336073969c3d94',1,'adaline_learning.c']]], - ['add_5fdigit_377',['add_digit',['../d6/d3d/factorial__large__number_8c.html#af2869d36c22a2b8f93d3166a84e124b3',1,'add_digit(large_num *num, unsigned int value): factorial_large_number.c'],['../db/d80/problem__20_2sol1_8c.html#afc373c28da6b17636528edcc97fb5f86',1,'add_digit(big_int *digit, char value): sol1.c']]], - ['add_5fnumbers_378',['add_numbers',['../db/d01/problem__13_2sol1_8c.html#ad51742ca5a5c99e860bdf30299163bf2',1,'add_numbers(uint8_t *a, uint8_t *b, uint8_t N): sol1.c'],['../d8/d32/problem__25_2sol1_8c.html#af9729befaffc1aab9ac9fedc4706e66c',1,'add_numbers(unsigned char *a, unsigned char *b, unsigned char *c, int N): sol1.c']]], - ['adler32_379',['adler32',['../d7/d3b/group__hash.html#ga506f0227a3b5f9434a503e09a3cb672b',1,'hash_adler32.c']]] + ['adaline_5factivation_381',['adaline_activation',['../da/d2a/group__adaline.html#ga43576566b020c4157d4fb28f0dd45cfa',1,'adaline_learning.c']]], + ['adaline_5ffit_382',['adaline_fit',['../da/d2a/group__adaline.html#gaa52120912e32d2893fe1c6d78da5befd',1,'adaline_learning.c']]], + ['adaline_5ffit_5fsample_383',['adaline_fit_sample',['../da/d2a/group__adaline.html#ga20d3642e0a87f36fdb7bf91b023cd166',1,'adaline_learning.c']]], + ['adaline_5fget_5fweights_5fstr_384',['adaline_get_weights_str',['../da/d2a/group__adaline.html#ga251695a79baa885cafdcf6d8ed4ac120',1,'adaline_learning.c']]], + ['adaline_5fpredict_385',['adaline_predict',['../da/d2a/group__adaline.html#gac70b578aee679005fd336073969c3d94',1,'adaline_learning.c']]], + ['add_5fdigit_386',['add_digit',['../d6/d3d/factorial__large__number_8c.html#af2869d36c22a2b8f93d3166a84e124b3',1,'add_digit(large_num *num, unsigned int value): factorial_large_number.c'],['../db/d80/problem__20_2sol1_8c.html#afc373c28da6b17636528edcc97fb5f86',1,'add_digit(big_int *digit, char value): sol1.c']]], + ['add_5fnumbers_387',['add_numbers',['../db/d01/problem__13_2sol1_8c.html#ad51742ca5a5c99e860bdf30299163bf2',1,'add_numbers(uint8_t *a, uint8_t *b, uint8_t N): sol1.c'],['../d8/d32/problem__25_2sol1_8c.html#af9729befaffc1aab9ac9fedc4706e66c',1,'add_numbers(unsigned char *a, unsigned char *b, unsigned char *c, int N): sol1.c']]], + ['adler32_388',['adler32',['../d7/d3b/group__hash.html#ga506f0227a3b5f9434a503e09a3cb672b',1,'hash_adler32.c']]] ]; diff --git a/search/functions_10.js b/search/functions_10.js index 15286342..859f9674 100644 --- a/search/functions_10.js +++ b/search/functions_10.js @@ -1,12 +1,12 @@ var searchData= [ - ['poly_5ffunction_464',['poly_function',['../da/d38/durand__kerner__roots_8c.html#a321f9781a9744ccdaf0aba89f35ec29c',1,'durand_kerner_roots.c']]], - ['postorder_5fdisplay_465',['postorder_display',['../df/d3c/threaded__binary__trees_8c.html#a5a82ae0ee13788be51ca4ba6cddb0719',1,'threaded_binary_trees.c']]], - ['preorder_5fdisplay_466',['preorder_display',['../df/d3c/threaded__binary__trees_8c.html#a8169ba0dfd5b8183672e444d1434bf9c',1,'threaded_binary_trees.c']]], - ['print_467',['print',['../dc/d80/cantor__set_8c.html#a75ee530cd7148a63249784ad3dda8fab',1,'print(CantorSet *head): cantor_set.c'],['../d5/df4/group__sudoku.html#ga702ff4f95dde780c7d04fcdd1021b6c1',1,'print(const struct sudoku *a): sudoku_solver.c']]], - ['print_5fmatrix_468',['print_matrix',['../d4/d68/qr__decompose_8h.html#a90562ce8c3707401e9c5809dece68d6a',1,'qr_decompose.h']]], - ['print_5fnumber_469',['print_number',['../db/d01/problem__13_2sol1_8c.html#a248adc917818cc6666d8bc679a660319',1,'print_number(uint8_t *number, uint8_t N, int8_t num_digits_to_print): sol1.c'],['../d8/d32/problem__25_2sol1_8c.html#abe5bc1f170b2108a19d0a16d30bd3235',1,'print_number(unsigned char *number, int N): sol1.c']]], - ['problem_470',['problem',['../d4/d07/ode__forward__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_semi_implicit_euler.c']]], - ['propagate_471',['propagate',['../dc/d80/cantor__set_8c.html#a1f156d2b53b80305bd2fa3ff5fdf3c97',1,'cantor_set.c']]], - ['purge_472',['purge',['../da/d02/binary__search__tree_8c.html#a01151353aa2d9688934ed39208133241',1,'binary_search_tree.c']]] + ['poly_5ffunction_473',['poly_function',['../da/d38/durand__kerner__roots_8c.html#a321f9781a9744ccdaf0aba89f35ec29c',1,'durand_kerner_roots.c']]], + ['postorder_5fdisplay_474',['postorder_display',['../df/d3c/threaded__binary__trees_8c.html#a5a82ae0ee13788be51ca4ba6cddb0719',1,'threaded_binary_trees.c']]], + ['preorder_5fdisplay_475',['preorder_display',['../df/d3c/threaded__binary__trees_8c.html#a8169ba0dfd5b8183672e444d1434bf9c',1,'threaded_binary_trees.c']]], + ['print_476',['print',['../dc/d80/cantor__set_8c.html#a75ee530cd7148a63249784ad3dda8fab',1,'print(CantorSet *head): cantor_set.c'],['../d5/df4/group__sudoku.html#ga702ff4f95dde780c7d04fcdd1021b6c1',1,'print(const struct sudoku *a): sudoku_solver.c']]], + ['print_5fmatrix_477',['print_matrix',['../d4/d68/qr__decompose_8h.html#a90562ce8c3707401e9c5809dece68d6a',1,'qr_decompose.h']]], + ['print_5fnumber_478',['print_number',['../db/d01/problem__13_2sol1_8c.html#a248adc917818cc6666d8bc679a660319',1,'print_number(uint8_t *number, uint8_t N, int8_t num_digits_to_print): sol1.c'],['../d8/d32/problem__25_2sol1_8c.html#abe5bc1f170b2108a19d0a16d30bd3235',1,'print_number(unsigned char *number, int N): sol1.c']]], + ['problem_479',['problem',['../d4/d07/ode__forward__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a97075291390a68c262ed66e157a57eb4',1,'problem(const double *x, double *y, double *dy): ode_semi_implicit_euler.c']]], + ['propagate_480',['propagate',['../dc/d80/cantor__set_8c.html#a1f156d2b53b80305bd2fa3ff5fdf3c97',1,'cantor_set.c']]], + ['purge_481',['purge',['../da/d02/binary__search__tree_8c.html#a01151353aa2d9688934ed39208133241',1,'binary_search_tree.c']]] ]; diff --git a/search/functions_11.js b/search/functions_11.js index 8f05995a..2ad4c2e4 100644 --- a/search/functions_11.js +++ b/search/functions_11.js @@ -1,4 +1,4 @@ var searchData= [ - ['qr_5fdecompose_473',['qr_decompose',['../d4/d68/qr__decompose_8h.html#a45c7640d9d22c89c11beb1f567843c56',1,'qr_decompose.h']]] + ['qr_5fdecompose_482',['qr_decompose',['../d4/d68/qr__decompose_8h.html#a45c7640d9d22c89c11beb1f567843c56',1,'qr_decompose.h']]] ]; diff --git a/search/functions_12.js b/search/functions_12.js index b0c41fcb..7b201fe6 100644 --- a/search/functions_12.js +++ b/search/functions_12.js @@ -1,4 +1,4 @@ var searchData= [ - ['remove_5fdigits_474',['remove_digits',['../db/d80/problem__20_2sol1_8c.html#a54a02c4b963fdb16f24959e0137763f1',1,'sol1.c']]] + ['remove_5fdigits_483',['remove_digits',['../db/d80/problem__20_2sol1_8c.html#a54a02c4b963fdb16f24959e0137763f1',1,'sol1.c']]] ]; diff --git a/search/functions_13.js b/search/functions_13.js index 4cf8a428..9ce900d7 100644 --- a/search/functions_13.js +++ b/search/functions_13.js @@ -1,22 +1,22 @@ var searchData= [ - ['save_5f2d_5fdata_475',['save_2d_data',['../d1/d6b/group__kohonen__2d.html#ga6824dc6d973eb3339af7aef5fea78b0c',1,'kohonen_som_topology.c']]], - ['save_5fnd_5fdata_476',['save_nd_data',['../d0/dcb/group__kohonen__1d.html#ga7b84b14e60f47812b581d1f93057c85a',1,'kohonen_som_trace.c']]], - ['save_5fu_5fmatrix_477',['save_u_matrix',['../d1/d6b/group__kohonen__2d.html#ga49d35f68f5d11d8ef6f8cce0d0e7bcba',1,'kohonen_som_topology.c']]], - ['sdbm_478',['sdbm',['../d7/d3b/group__hash.html#ga8ab8eeb35f8ccfcad89091b5fdd4f605',1,'hash_sdbm.c']]], - ['search_479',['search',['../df/d3c/threaded__binary__trees_8c.html#a306d567466f22e1e927aaed97d8bb58c',1,'threaded_binary_trees.c']]], - ['selectionsort_480',['selectionSort',['../df/d83/selection__sort_8c.html#aeafe7419cfceaeccaf49f22842d9a617',1,'selection_sort.c']]], - ['semi_5fimplicit_5feuler_481',['semi_implicit_euler',['../d4/d99/ode__semi__implicit__euler_8c.html#ad80059877222f885b549f2d0a3dc6b55',1,'ode_semi_implicit_euler.c']]], - ['semi_5fimplicit_5feuler_5fstep_482',['semi_implicit_euler_step',['../d4/d99/ode__semi__implicit__euler_8c.html#a720b7e995d2bbc615f94a2c7dbcf84eb',1,'ode_semi_implicit_euler.c']]], - ['shell_5fsort_483',['shell_sort',['../dd/d8b/problem__22_2sol1_8c.html#a5bc3659aa0949ea33118c95b1dee5f63',1,'shell_sort(char data[][MAX_NAME_LEN], int LEN): sol1.c'],['../d5/d4c/group__sorting.html#ga5bc16eaf3ffe6a6ab66780dd445904c0',1,'shell_sort(int *array, long LEN): shell_sort2.c']]], - ['show_5fdata_484',['show_data',['../d5/d4c/group__sorting.html#gaeccaf61ff47279384d1dba8d869d5c2f',1,'shell_sort2.c']]], - ['sigma_485',['sigma',['../d4/d83/problem__401_2sol1_8c.html#aaf964739be92adc2f500e7da11e3f6be',1,'sol1.c']]], - ['sigma2_486',['sigma2',['../d4/d83/problem__401_2sol1_8c.html#a236548478af932f1115a71f601a68788',1,'sol1.c']]], - ['solve_487',['solve',['../d5/df4/group__sudoku.html#gadfe0ed5085b4775d8fa00b434cc0fdfc',1,'sudoku_solver.c']]], - ['spirograph_488',['spirograph',['../d7/d98/spirograph_8c.html#a0daa148091ec953809fc172289f773d3',1,'spirograph.c']]], - ['stats_5fcomputer1_489',['stats_computer1',['../dc/d47/realtime__stats_8c.html#a63ddcdaab24f722f0963fa2fbe0ae628',1,'realtime_stats.c']]], - ['stats_5fcomputer2_490',['stats_computer2',['../dc/d47/realtime__stats_8c.html#a34be233a9200ee2065f6b7b27e2d9a96',1,'realtime_stats.c']]], - ['sum_5fof_5fdivisors_491',['sum_of_divisors',['../df/d1a/problem__21_2sol1_8c.html#aacf4b7e708651d2164e86958f2c29c93',1,'sol1.c']]], - ['sum_5fof_5fprimes_492',['sum_of_primes',['../d0/d6d/problem__10_2sol1_8c.html#ae3d987cb2ad0ddb0c3caa4c2506a20e5',1,'sol1.c']]], - ['swap_493',['swap',['../dd/de4/bubble__sort_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): bubble_sort_recursion.c'],['../d5/d4c/group__sorting.html#ga4b9708d87be7a409eff20e5e7e8b43c8',1,'swap(int *a, int *b): merge_sort.c'],['../df/d83/selection__sort_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): selection_sort.c']]] + ['save_5f2d_5fdata_484',['save_2d_data',['../d1/d6b/group__kohonen__2d.html#ga6824dc6d973eb3339af7aef5fea78b0c',1,'kohonen_som_topology.c']]], + ['save_5fnd_5fdata_485',['save_nd_data',['../d0/dcb/group__kohonen__1d.html#ga7b84b14e60f47812b581d1f93057c85a',1,'kohonen_som_trace.c']]], + ['save_5fu_5fmatrix_486',['save_u_matrix',['../d1/d6b/group__kohonen__2d.html#ga49d35f68f5d11d8ef6f8cce0d0e7bcba',1,'kohonen_som_topology.c']]], + ['sdbm_487',['sdbm',['../d7/d3b/group__hash.html#ga8ab8eeb35f8ccfcad89091b5fdd4f605',1,'hash_sdbm.c']]], + ['search_488',['search',['../df/d3c/threaded__binary__trees_8c.html#a306d567466f22e1e927aaed97d8bb58c',1,'threaded_binary_trees.c']]], + ['selectionsort_489',['selectionSort',['../df/d83/selection__sort_8c.html#aeafe7419cfceaeccaf49f22842d9a617',1,'selection_sort.c']]], + ['semi_5fimplicit_5feuler_490',['semi_implicit_euler',['../d4/d99/ode__semi__implicit__euler_8c.html#ad80059877222f885b549f2d0a3dc6b55',1,'ode_semi_implicit_euler.c']]], + ['semi_5fimplicit_5feuler_5fstep_491',['semi_implicit_euler_step',['../d4/d99/ode__semi__implicit__euler_8c.html#a720b7e995d2bbc615f94a2c7dbcf84eb',1,'ode_semi_implicit_euler.c']]], + ['shell_5fsort_492',['shell_sort',['../dd/d8b/problem__22_2sol1_8c.html#a5bc3659aa0949ea33118c95b1dee5f63',1,'shell_sort(char data[][MAX_NAME_LEN], int LEN): sol1.c'],['../d5/d4c/group__sorting.html#ga5bc16eaf3ffe6a6ab66780dd445904c0',1,'shell_sort(int *array, long LEN): shell_sort2.c']]], + ['show_5fdata_493',['show_data',['../d5/d4c/group__sorting.html#gaeccaf61ff47279384d1dba8d869d5c2f',1,'shell_sort2.c']]], + ['sigma_494',['sigma',['../d4/d83/problem__401_2sol1_8c.html#aaf964739be92adc2f500e7da11e3f6be',1,'sol1.c']]], + ['sigma2_495',['sigma2',['../d4/d83/problem__401_2sol1_8c.html#a236548478af932f1115a71f601a68788',1,'sol1.c']]], + ['solve_496',['solve',['../d5/df4/group__sudoku.html#gadfe0ed5085b4775d8fa00b434cc0fdfc',1,'sudoku_solver.c']]], + ['spirograph_497',['spirograph',['../d7/d98/spirograph_8c.html#a0daa148091ec953809fc172289f773d3',1,'spirograph.c']]], + ['stats_5fcomputer1_498',['stats_computer1',['../dc/d47/realtime__stats_8c.html#a63ddcdaab24f722f0963fa2fbe0ae628',1,'realtime_stats.c']]], + ['stats_5fcomputer2_499',['stats_computer2',['../dc/d47/realtime__stats_8c.html#a34be233a9200ee2065f6b7b27e2d9a96',1,'realtime_stats.c']]], + ['sum_5fof_5fdivisors_500',['sum_of_divisors',['../df/d1a/problem__21_2sol1_8c.html#aacf4b7e708651d2164e86958f2c29c93',1,'sol1.c']]], + ['sum_5fof_5fprimes_501',['sum_of_primes',['../d0/d6d/problem__10_2sol1_8c.html#ae3d987cb2ad0ddb0c3caa4c2506a20e5',1,'sol1.c']]], + ['swap_502',['swap',['../dd/de4/bubble__sort_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): bubble_sort_recursion.c'],['../d5/d4c/group__sorting.html#ga4b9708d87be7a409eff20e5e7e8b43c8',1,'swap(int *a, int *b): merge_sort.c'],['../df/d83/selection__sort_8c.html#ad126fa7239be97373c96861adc70b1d3',1,'swap(int *first, int *second): selection_sort.c']]] ]; diff --git a/search/functions_14.js b/search/functions_14.js index 340c30a3..e9679866 100644 --- a/search/functions_14.js +++ b/search/functions_14.js @@ -1,21 +1,21 @@ var searchData= [ - ['test_494',['test',['../d8/d30/decimal__to__binary__recursion_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): int_to_string.c'],['../d7/d98/spirograph_8c.html#a708a4c1a4d0c4acc4c447310dd4db27f',1,'test(void): spirograph.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): cartesian_to_polar.c'],['../df/d3b/binary__search_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): jump_search.c'],['../dd/de4/bubble__sort_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): bubble_sort_recursion.c'],['../db/ddf/insertion__sort_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): insertion_sort.c'],['../df/d83/selection__sort_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): selection_sort.c']]], - ['test1_495',['test1',['../dd/d8c/adaline__learning_8c.html#ab4ecb3accf5d9e0263087e7265bbe3a9',1,'test1(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): kohonen_som_trace.c'],['../d7/d50/qr__eigen__values_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): qr_eigen_values.c']]], - ['test2_496',['test2',['../dd/d8c/adaline__learning_8c.html#a05cc9a0acb524fde727a4d7b4a747ee6',1,'test2(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): kohonen_som_trace.c'],['../d7/d50/qr__eigen__values_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): qr_eigen_values.c']]], - ['test3_497',['test3',['../dd/d8c/adaline__learning_8c.html#a3f37b9f073f7e57fd0b39d70718af1b1',1,'test3(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a6d0455dd5c30adda100e95f0423c786e',1,'test3(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a6d0455dd5c30adda100e95f0423c786e',1,'test3(): kohonen_som_trace.c']]], - ['test_5f2d_5fclasses_498',['test_2d_classes',['../d2/df6/kohonen__som__topology_8c.html#adb5ded007be1fd666fab9affe6764018',1,'kohonen_som_topology.c']]], - ['test_5f3d_5fclasses_499',['test_3d_classes',['../d0/d46/kohonen__som__trace_8c.html#a41ae16442e3e5b891a58d2e5932a2cd0',1,'kohonen_som_trace.c']]], - ['test_5f3d_5fclasses1_500',['test_3d_classes1',['../d2/df6/kohonen__som__topology_8c.html#ad9e25202bb8b481461f932668f249dbc',1,'kohonen_som_topology.c']]], - ['test_5f3d_5fclasses2_501',['test_3d_classes2',['../d2/df6/kohonen__som__topology_8c.html#a5bb02a8322d717ead1b11182c5f02a3a',1,'kohonen_som_topology.c']]], - ['test_5fadler32_502',['test_adler32',['../d7/d3b/group__hash.html#ga994ea8b243b6c0fbef734551ec5765dd',1,'hash_adler32.c']]], - ['test_5fc_5fatoi_503',['test_c_atoi',['../d7/dd8/c__atoi__str__to__integer_8c.html#a8c66c03637e48e375b80b5d7791e57be',1,'c_atoi_str_to_integer.c']]], - ['test_5fcircle_504',['test_circle',['../d0/d46/kohonen__som__trace_8c.html#a107f00650b8041f77767927073ddddb8',1,'kohonen_som_trace.c']]], - ['test_5fcrc32_505',['test_crc32',['../d7/d3b/group__hash.html#gad451622bbdca271edfa8e0d98ca422f2',1,'hash_crc32.c']]], - ['test_5fdjb2_506',['test_djb2',['../d7/d3b/group__hash.html#ga9f76001544014905468dc812336110d5',1,'hash_djb2.c']]], - ['test_5ffunction_507',['test_function',['../dc/d47/realtime__stats_8c.html#aa54c915581fcc495489175a4386d59fd',1,'realtime_stats.c']]], - ['test_5flamniscate_508',['test_lamniscate',['../d0/d46/kohonen__som__trace_8c.html#aa2246f940155472084ee461f3685d614',1,'kohonen_som_trace.c']]], - ['test_5fsdbm_509',['test_sdbm',['../d7/d3b/group__hash.html#gab87679863646255178427a56dc33e453',1,'hash_sdbm.c']]], - ['test_5fxor8_510',['test_xor8',['../d7/d3b/group__hash.html#ga39d4c16427acbf8bbe744f6d8ed61dc0',1,'hash_xor8.c']]], - ['to_5fpolar_511',['to_polar',['../d6/d2e/cartesian__to__polar_8c.html#afb80d77f0c994240309ccddcc9525e70',1,'cartesian_to_polar.c']]] + ['test_503',['test',['../d8/d30/decimal__to__binary__recursion_8c.html#ad69dd4607977cae05ebe19d1ae604fb1',1,'test(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): int_to_string.c'],['../d7/d98/spirograph_8c.html#a708a4c1a4d0c4acc4c447310dd4db27f',1,'test(void): spirograph.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): cartesian_to_polar.c'],['../df/d3b/binary__search_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): jump_search.c'],['../dd/de4/bubble__sort_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae1a3968e7947464bee7714f6d43b7002',1,'test(): bubble_sort_recursion.c'],['../db/ddf/insertion__sort_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): insertion_sort.c'],['../df/d83/selection__sort_8c.html#aa8dca7b867074164d5f45b0f3851269d',1,'test(): selection_sort.c']]], + ['test1_504',['test1',['../dd/d8c/adaline__learning_8c.html#ab4ecb3accf5d9e0263087e7265bbe3a9',1,'test1(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): kohonen_som_trace.c'],['../d7/d50/qr__eigen__values_8c.html#a1440a7779ac56f47a3f355ce4a8c7da0',1,'test1(): qr_eigen_values.c']]], + ['test2_505',['test2',['../dd/d8c/adaline__learning_8c.html#a05cc9a0acb524fde727a4d7b4a747ee6',1,'test2(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): kohonen_som_trace.c'],['../d7/d50/qr__eigen__values_8c.html#a0283886819c7c140a023582b7269e2d0',1,'test2(): qr_eigen_values.c']]], + ['test3_506',['test3',['../dd/d8c/adaline__learning_8c.html#a3f37b9f073f7e57fd0b39d70718af1b1',1,'test3(double eta): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a6d0455dd5c30adda100e95f0423c786e',1,'test3(): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a6d0455dd5c30adda100e95f0423c786e',1,'test3(): kohonen_som_trace.c']]], + ['test_5f2d_5fclasses_507',['test_2d_classes',['../d2/df6/kohonen__som__topology_8c.html#adb5ded007be1fd666fab9affe6764018',1,'kohonen_som_topology.c']]], + ['test_5f3d_5fclasses_508',['test_3d_classes',['../d0/d46/kohonen__som__trace_8c.html#a41ae16442e3e5b891a58d2e5932a2cd0',1,'kohonen_som_trace.c']]], + ['test_5f3d_5fclasses1_509',['test_3d_classes1',['../d2/df6/kohonen__som__topology_8c.html#ad9e25202bb8b481461f932668f249dbc',1,'kohonen_som_topology.c']]], + ['test_5f3d_5fclasses2_510',['test_3d_classes2',['../d2/df6/kohonen__som__topology_8c.html#a5bb02a8322d717ead1b11182c5f02a3a',1,'kohonen_som_topology.c']]], + ['test_5fadler32_511',['test_adler32',['../d7/d3b/group__hash.html#ga994ea8b243b6c0fbef734551ec5765dd',1,'hash_adler32.c']]], + ['test_5fc_5fatoi_512',['test_c_atoi',['../d7/dd8/c__atoi__str__to__integer_8c.html#a8c66c03637e48e375b80b5d7791e57be',1,'c_atoi_str_to_integer.c']]], + ['test_5fcircle_513',['test_circle',['../d0/d46/kohonen__som__trace_8c.html#a107f00650b8041f77767927073ddddb8',1,'kohonen_som_trace.c']]], + ['test_5fcrc32_514',['test_crc32',['../d7/d3b/group__hash.html#gad451622bbdca271edfa8e0d98ca422f2',1,'hash_crc32.c']]], + ['test_5fdjb2_515',['test_djb2',['../d7/d3b/group__hash.html#ga9f76001544014905468dc812336110d5',1,'hash_djb2.c']]], + ['test_5ffunction_516',['test_function',['../dc/d47/realtime__stats_8c.html#aa54c915581fcc495489175a4386d59fd',1,'realtime_stats.c']]], + ['test_5flamniscate_517',['test_lamniscate',['../d0/d46/kohonen__som__trace_8c.html#aa2246f940155472084ee461f3685d614',1,'kohonen_som_trace.c']]], + ['test_5fsdbm_518',['test_sdbm',['../d7/d3b/group__hash.html#gab87679863646255178427a56dc33e453',1,'hash_sdbm.c']]], + ['test_5fxor8_519',['test_xor8',['../d7/d3b/group__hash.html#ga39d4c16427acbf8bbe744f6d8ed61dc0',1,'hash_xor8.c']]], + ['to_5fpolar_520',['to_polar',['../d6/d2e/cartesian__to__polar_8c.html#afb80d77f0c994240309ccddcc9525e70',1,'cartesian_to_polar.c']]] ]; diff --git a/search/functions_15.js b/search/functions_15.js index 8a41ad3e..9c6a5209 100644 --- a/search/functions_15.js +++ b/search/functions_15.js @@ -1,7 +1,7 @@ var searchData= [ - ['vector_5fdot_512',['vector_dot',['../d4/d68/qr__decompose_8h.html#a3a584b79941a43d775f9d4ce446dbe05',1,'qr_decompose.h']]], - ['vector_5fmag_513',['vector_mag',['../d4/d68/qr__decompose_8h.html#abeec1f78a7a7e7251687e75340331212',1,'qr_decompose.h']]], - ['vector_5fproj_514',['vector_proj',['../d4/d68/qr__decompose_8h.html#a82b20e027437df768d7e994cf4cae29f',1,'qr_decompose.h']]], - ['vector_5fsub_515',['vector_sub',['../d4/d68/qr__decompose_8h.html#a6b6a0e75e75ff7919057dd275bb69145',1,'qr_decompose.h']]] + ['vector_5fdot_521',['vector_dot',['../d4/d68/qr__decompose_8h.html#a3a584b79941a43d775f9d4ce446dbe05',1,'qr_decompose.h']]], + ['vector_5fmag_522',['vector_mag',['../d4/d68/qr__decompose_8h.html#abeec1f78a7a7e7251687e75340331212',1,'qr_decompose.h']]], + ['vector_5fproj_523',['vector_proj',['../d4/d68/qr__decompose_8h.html#a82b20e027437df768d7e994cf4cae29f',1,'qr_decompose.h']]], + ['vector_5fsub_524',['vector_sub',['../d4/d68/qr__decompose_8h.html#a6b6a0e75e75ff7919057dd275bb69145',1,'qr_decompose.h']]] ]; diff --git a/search/functions_16.js b/search/functions_16.js index 974cfb20..91cee58b 100644 --- a/search/functions_16.js +++ b/search/functions_16.js @@ -1,4 +1,4 @@ var searchData= [ - ['xor8_516',['xor8',['../d7/d3b/group__hash.html#gae4836b42b998b336298f3b19dcc9cdeb',1,'hash_xor8.c']]] + ['xor8_525',['xor8',['../d7/d3b/group__hash.html#gae4836b42b998b336298f3b19dcc9cdeb',1,'hash_xor8.c']]] ]; diff --git a/search/functions_2.js b/search/functions_2.js index 8753806d..746875f1 100644 --- a/search/functions_2.js +++ b/search/functions_2.js @@ -1,8 +1,8 @@ var searchData= [ - ['bead_5fsort_380',['bead_sort',['../d5/d4c/group__sorting.html#ga2fb01e00dedb437a42010f6309e7eba8',1,'bead_sort.c']]], - ['binarysearch_381',['binarySearch',['../d3/d47/modified__binary__search_8c.html#a0cfaa56aacf960e4628a0fb27add8890',1,'modified_binary_search.c']]], - ['binarysearch1_382',['binarysearch1',['../df/d3b/binary__search_8c.html#a40855c608ca64048d04cff6526f0a582',1,'binary_search.c']]], - ['binarysearch2_383',['binarysearch2',['../df/d3b/binary__search_8c.html#a908fd6d2ad0bba33f63f8454888a0032',1,'binary_search.c']]], - ['bubblesort_384',['bubbleSort',['../dd/de4/bubble__sort_8c.html#aa8989f6c9bfd1f040854fa18b180114f',1,'bubbleSort(int *arr, int size): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#aa8989f6c9bfd1f040854fa18b180114f',1,'bubbleSort(int *arr, int size): bubble_sort_recursion.c']]] + ['bead_5fsort_389',['bead_sort',['../d5/d4c/group__sorting.html#ga2fb01e00dedb437a42010f6309e7eba8',1,'bead_sort.c']]], + ['binarysearch_390',['binarySearch',['../d3/d47/modified__binary__search_8c.html#a0cfaa56aacf960e4628a0fb27add8890',1,'modified_binary_search.c']]], + ['binarysearch1_391',['binarysearch1',['../df/d3b/binary__search_8c.html#a40855c608ca64048d04cff6526f0a582',1,'binary_search.c']]], + ['binarysearch2_392',['binarysearch2',['../df/d3b/binary__search_8c.html#a908fd6d2ad0bba33f63f8454888a0032',1,'binary_search.c']]], + ['bubblesort_393',['bubbleSort',['../dd/de4/bubble__sort_8c.html#aa8989f6c9bfd1f040854fa18b180114f',1,'bubbleSort(int *arr, int size): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#aa8989f6c9bfd1f040854fa18b180114f',1,'bubbleSort(int *arr, int size): bubble_sort_recursion.c']]] ]; diff --git a/search/functions_3.js b/search/functions_3.js index be847642..4800d9b5 100644 --- a/search/functions_3.js +++ b/search/functions_3.js @@ -1,12 +1,12 @@ var searchData= [ - ['c_5fatoi_385',['c_atoi',['../d7/dd8/c__atoi__str__to__integer_8c.html#ad19049ebfc2088bc1e75e7e958f7b60f',1,'c_atoi_str_to_integer.c']]], - ['check_5ftermination_386',['check_termination',['../da/d38/durand__kerner__roots_8c.html#a26d5695ebed0818a3e7cf4b10aacab52',1,'durand_kerner_roots.c']]], - ['collatz_387',['collatz',['../d4/dea/problem__14_2sol1_8c.html#a81c1df5c17cb16bcc16e346fcff6fa80',1,'sol1.c']]], - ['compare_388',['compare',['../d1/df9/problem__26_2sol1_8c.html#ac70138609ef6aa6fabca57aca8681e83',1,'sol1.c']]], - ['complex_5fstr_389',['complex_str',['../da/d38/durand__kerner__roots_8c.html#afa5b04ce11475d67049cba8273741fb7',1,'durand_kerner_roots.c']]], - ['count_5fdivisors_390',['count_divisors',['../d7/d1f/problem__12_2sol1_8c.html#aa6ce6271f6156e219f9b290717f5a222',1,'sol1.c']]], - ['crc32_391',['crc32',['../d7/d3b/group__hash.html#ga483e7ee6db1dc09a0f3e683e028ec567',1,'hash_crc32.c']]], - ['create_5fmatrix_392',['create_matrix',['../d7/d50/qr__eigen__values_8c.html#a7d96c5e4ae1bd6d29791bcc23a4cb2b0',1,'qr_eigen_values.c']]], - ['create_5fnode_393',['create_node',['../df/d3c/threaded__binary__trees_8c.html#ab21d1d36d95001defbca2f6abd4d410c',1,'threaded_binary_trees.c']]] + ['c_5fatoi_394',['c_atoi',['../d7/dd8/c__atoi__str__to__integer_8c.html#ad19049ebfc2088bc1e75e7e958f7b60f',1,'c_atoi_str_to_integer.c']]], + ['check_5ftermination_395',['check_termination',['../da/d38/durand__kerner__roots_8c.html#a26d5695ebed0818a3e7cf4b10aacab52',1,'durand_kerner_roots.c']]], + ['collatz_396',['collatz',['../d4/dea/problem__14_2sol1_8c.html#a81c1df5c17cb16bcc16e346fcff6fa80',1,'sol1.c']]], + ['compare_397',['compare',['../d1/df9/problem__26_2sol1_8c.html#ac70138609ef6aa6fabca57aca8681e83',1,'sol1.c']]], + ['complex_5fstr_398',['complex_str',['../da/d38/durand__kerner__roots_8c.html#afa5b04ce11475d67049cba8273741fb7',1,'durand_kerner_roots.c']]], + ['count_5fdivisors_399',['count_divisors',['../d7/d1f/problem__12_2sol1_8c.html#aa6ce6271f6156e219f9b290717f5a222',1,'sol1.c']]], + ['crc32_400',['crc32',['../d7/d3b/group__hash.html#ga483e7ee6db1dc09a0f3e683e028ec567',1,'hash_crc32.c']]], + ['create_5fmatrix_401',['create_matrix',['../d7/d50/qr__eigen__values_8c.html#a7d96c5e4ae1bd6d29791bcc23a4cb2b0',1,'qr_eigen_values.c']]], + ['create_5fnode_402',['create_node',['../df/d3c/threaded__binary__trees_8c.html#ab21d1d36d95001defbca2f6abd4d410c',1,'threaded_binary_trees.c']]] ]; diff --git a/search/functions_4.js b/search/functions_4.js index 1d245853..656d66d5 100644 --- a/search/functions_4.js +++ b/search/functions_4.js @@ -1,11 +1,11 @@ var searchData= [ - ['d_5ffunc_394',['d_func',['../dd/d08/newton__raphson__root_8c.html#ae713a1fd0c275fbec7edf263ac2c0337',1,'newton_raphson_root.c']]], - ['decimal_5fto_5fbinary_395',['decimal_to_binary',['../d8/d30/decimal__to__binary__recursion_8c.html#acbbe6358ec95b3201865a72b2ac522c8',1,'decimal_to_binary_recursion.c']]], - ['delete_396',['delete',['../da/d02/binary__search__tree_8c.html#a748f3966920e2fd197906be1e151b127',1,'binary_search_tree.c']]], - ['delete_5fadaline_397',['delete_adaline',['../da/d2a/group__adaline.html#ga6f35caa3084772cc126ac7b20f67f665',1,'adaline_learning.c']]], - ['delete_5fbt_398',['delete_bt',['../df/d3c/threaded__binary__trees_8c.html#a284d683f74b6c884e79ba00d3d1c3317',1,'threaded_binary_trees.c']]], - ['delete_5fnumber_399',['delete_number',['../d6/d3d/factorial__large__number_8c.html#ab5c854e0df76165c31899e69eceeeaae',1,'factorial_large_number.c']]], - ['display_400',['display',['../dc/d2e/lu__decompose_8c.html#a0789beb8d3396582d77b7aedf5e5554a',1,'display(double **A, int N): lu_decompose.c'],['../d5/d4c/group__sorting.html#gad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bubble_sort.c']]], - ['djb2_401',['djb2',['../d7/d3b/group__hash.html#ga1ac362fa25f7c35d104205985f8e754b',1,'hash_djb2.c']]] + ['d_5ffunc_403',['d_func',['../dd/d08/newton__raphson__root_8c.html#ae713a1fd0c275fbec7edf263ac2c0337',1,'newton_raphson_root.c']]], + ['decimal_5fto_5fbinary_404',['decimal_to_binary',['../d8/d30/decimal__to__binary__recursion_8c.html#acbbe6358ec95b3201865a72b2ac522c8',1,'decimal_to_binary_recursion.c']]], + ['delete_405',['delete',['../da/d02/binary__search__tree_8c.html#a748f3966920e2fd197906be1e151b127',1,'binary_search_tree.c']]], + ['delete_5fadaline_406',['delete_adaline',['../da/d2a/group__adaline.html#ga6f35caa3084772cc126ac7b20f67f665',1,'adaline_learning.c']]], + ['delete_5fbt_407',['delete_bt',['../df/d3c/threaded__binary__trees_8c.html#a284d683f74b6c884e79ba00d3d1c3317',1,'threaded_binary_trees.c']]], + ['delete_5fnumber_408',['delete_number',['../d6/d3d/factorial__large__number_8c.html#ab5c854e0df76165c31899e69eceeeaae',1,'factorial_large_number.c']]], + ['display_409',['display',['../dc/d2e/lu__decompose_8c.html#a0789beb8d3396582d77b7aedf5e5554a',1,'display(double **A, int N): lu_decompose.c'],['../d5/d4c/group__sorting.html#gad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ad7ed8cc4603f500d610054680d28b971',1,'display(const int *arr, int n): bubble_sort.c']]], + ['djb2_410',['djb2',['../d7/d3b/group__hash.html#ga1ac362fa25f7c35d104205985f8e754b',1,'hash_djb2.c']]] ]; diff --git a/search/functions_5.js b/search/functions_5.js index f587475c..2d8a9e9b 100644 --- a/search/functions_5.js +++ b/search/functions_5.js @@ -1,5 +1,5 @@ var searchData= [ - ['eigen_5fvalues_402',['eigen_values',['../d7/d50/qr__eigen__values_8c.html#a0d8ed79786d17df48396b333c09d05bb',1,'qr_eigen_values.c']]], - ['exact_5fsolution_403',['exact_solution',['../d4/d07/ode__forward__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_semi_implicit_euler.c']]] + ['eigen_5fvalues_411',['eigen_values',['../d7/d50/qr__eigen__values_8c.html#a0d8ed79786d17df48396b333c09d05bb',1,'qr_eigen_values.c']]], + ['exact_5fsolution_412',['exact_solution',['../d4/d07/ode__forward__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a8caee977b26888d34040b122e0e28e3a',1,'exact_solution(const double *x, double *y): ode_semi_implicit_euler.c']]] ]; diff --git a/search/functions_6.js b/search/functions_6.js index 1fcda0e7..2872f3ce 100644 --- a/search/functions_6.js +++ b/search/functions_6.js @@ -1,9 +1,9 @@ var searchData= [ - ['fib_404',['fib',['../d4/d99/fibonacci__fast_8c.html#a7a3d55bd19854075cba2eed6b63cb2d3',1,'fibonacci_fast.c']]], - ['find_405',['find',['../da/d02/binary__search__tree_8c.html#adff4c6248834a9944a1fb03a20230c9c',1,'find(node *root, int data): binary_search_tree.c'],['../df/df3/union__find_8c.html#a3e13b69cce5a1b25ae034798092f3d86',1,'find(int *p, int x): union_find.c']]], - ['forward_5feuler_406',['forward_euler',['../d4/d07/ode__forward__euler_8c.html#aaf88ad8f9f7c39fc38f3f03d6fea9df9',1,'ode_forward_euler.c']]], - ['forward_5feuler_5fstep_407',['forward_euler_step',['../d4/d07/ode__forward__euler_8c.html#ae6c9413953c8d9d4bc9e374b29586350',1,'ode_forward_euler.c']]], - ['free_5fmemory_408',['free_memory',['../dc/d80/cantor__set_8c.html#a85df3c64a683100ac6246e1e034df43d',1,'cantor_set.c']]], - ['func_409',['func',['../dd/d93/client_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): client.c'],['../d1/d20/server_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): server.c'],['../dd/d08/newton__raphson__root_8c.html#a72f87d423a488946b319627a454d3925',1,'func(double complex x): newton_raphson_root.c']]] + ['fib_413',['fib',['../d4/d99/fibonacci__fast_8c.html#a7a3d55bd19854075cba2eed6b63cb2d3',1,'fibonacci_fast.c']]], + ['find_414',['find',['../da/d02/binary__search__tree_8c.html#adff4c6248834a9944a1fb03a20230c9c',1,'find(node *root, int data): binary_search_tree.c'],['../df/df3/union__find_8c.html#a3e13b69cce5a1b25ae034798092f3d86',1,'find(int *p, int x): union_find.c']]], + ['forward_5feuler_415',['forward_euler',['../d4/d07/ode__forward__euler_8c.html#aaf88ad8f9f7c39fc38f3f03d6fea9df9',1,'ode_forward_euler.c']]], + ['forward_5feuler_5fstep_416',['forward_euler_step',['../d4/d07/ode__forward__euler_8c.html#ae6c9413953c8d9d4bc9e374b29586350',1,'ode_forward_euler.c']]], + ['free_5fmemory_417',['free_memory',['../dc/d80/cantor__set_8c.html#a85df3c64a683100ac6246e1e034df43d',1,'cantor_set.c']]], + ['func_418',['func',['../dd/d93/client_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): client.c'],['../d1/d20/server_8c.html#ac17020a38607ab29ce18939d5194a32a',1,'func(int sockfd): server.c'],['../dd/d08/newton__raphson__root_8c.html#a72f87d423a488946b319627a454d3925',1,'func(double complex x): newton_raphson_root.c']]] ]; diff --git a/search/functions_7.js b/search/functions_7.js index 4b1e7f92..1b3423f9 100644 --- a/search/functions_7.js +++ b/search/functions_7.js @@ -1,16 +1,16 @@ var searchData= [ - ['gcd_410',['gcd',['../df/de7/problem__5_2sol_8c.html#a59347107cbfdf48d51108e50280e760d',1,'sol.c']]], - ['get_5fclock_5fdiff_411',['get_clock_diff',['../d2/df6/kohonen__som__topology_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_trace.c']]], - ['get_5fdigits_412',['get_digits',['../d8/d32/problem__25_2sol1_8c.html#a2b90df6bfbf0d18cd9a19c1a71453783',1,'sol1.c']]], - ['get_5fdivisors_413',['get_divisors',['../d4/d83/problem__401_2sol1_8c.html#a7380e14d595d560007b02ce516b6b215',1,'sol1.c']]], - ['get_5fmin_5f2d_414',['get_min_2d',['../d1/d6b/group__kohonen__2d.html#gadc22d512c00a9f5799ee067f4fb90b4b',1,'kohonen_som_topology.c']]], - ['get_5fmonth_5fdays_415',['get_month_days',['../dd/df0/problem__19_2sol1_8c.html#ab7f9ad087f124b8e0615aa535b4c8a75',1,'sol1.c']]], - ['get_5fnext_5fabundant_416',['get_next_abundant',['../d7/ddb/problem__23_2sol1_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol2.c']]], - ['get_5fnext_5funknown_417',['get_next_unknown',['../d5/df4/group__sudoku.html#ga62e94fc39f116e2c81daed8f5437431b',1,'sudoku_solver.c']]], - ['get_5fnumber_418',['get_number',['../db/d01/problem__13_2sol1_8c.html#ac260f58785fb20eb09bb35385a7d47f8',1,'sol1.c']]], - ['get_5fperfect_5fnumber_419',['get_perfect_number',['../d7/ddb/problem__23_2sol1_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol2.c']]], - ['get_5fproduct_420',['get_product',['../dc/d63/problem__8_2sol1_8c.html#a9ffc8845f17b01a353767a40a3adf7bd',1,'sol1.c']]], - ['get_5frand_421',['get_rand',['../d6/d2e/cartesian__to__polar_8c.html#a60e62b809ca9dcb1b20a140b30d30f60',1,'cartesian_to_polar.c']]], - ['getmax_422',['getMax',['../da/d02/binary__search__tree_8c.html#ad297e528a7bb8604ca93af149d609150',1,'binary_search_tree.c']]] + ['gcd_419',['gcd',['../df/de7/problem__5_2sol_8c.html#a59347107cbfdf48d51108e50280e760d',1,'sol.c']]], + ['get_5fclock_5fdiff_420',['get_clock_diff',['../d2/df6/kohonen__som__topology_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a2256c10b16edba377b64a44b6c656908',1,'get_clock_diff(clock_t start_t, clock_t end_t): kohonen_som_trace.c']]], + ['get_5fdigits_421',['get_digits',['../d8/d32/problem__25_2sol1_8c.html#a2b90df6bfbf0d18cd9a19c1a71453783',1,'sol1.c']]], + ['get_5fdivisors_422',['get_divisors',['../d4/d83/problem__401_2sol1_8c.html#a7380e14d595d560007b02ce516b6b215',1,'sol1.c']]], + ['get_5fmin_5f2d_423',['get_min_2d',['../d1/d6b/group__kohonen__2d.html#gadc22d512c00a9f5799ee067f4fb90b4b',1,'kohonen_som_topology.c']]], + ['get_5fmonth_5fdays_424',['get_month_days',['../dd/df0/problem__19_2sol1_8c.html#ab7f9ad087f124b8e0615aa535b4c8a75',1,'sol1.c']]], + ['get_5fnext_5fabundant_425',['get_next_abundant',['../d7/ddb/problem__23_2sol1_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#ac5d600bf3077f4188afc4c5cd2c40eaf',1,'get_next_abundant(unsigned long N): sol2.c']]], + ['get_5fnext_5funknown_426',['get_next_unknown',['../d5/df4/group__sudoku.html#ga62e94fc39f116e2c81daed8f5437431b',1,'sudoku_solver.c']]], + ['get_5fnumber_427',['get_number',['../db/d01/problem__13_2sol1_8c.html#ac260f58785fb20eb09bb35385a7d47f8',1,'sol1.c']]], + ['get_5fperfect_5fnumber_428',['get_perfect_number',['../d7/ddb/problem__23_2sol1_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a1aca7f530f82b27100262adba9e7556b',1,'get_perfect_number(unsigned long N): sol2.c']]], + ['get_5fproduct_429',['get_product',['../dc/d63/problem__8_2sol1_8c.html#a9ffc8845f17b01a353767a40a3adf7bd',1,'sol1.c']]], + ['get_5frand_430',['get_rand',['../d6/d2e/cartesian__to__polar_8c.html#a60e62b809ca9dcb1b20a140b30d30f60',1,'cartesian_to_polar.c']]], + ['getmax_431',['getMax',['../da/d02/binary__search__tree_8c.html#ad297e528a7bb8604ca93af149d609150',1,'binary_search_tree.c']]] ]; diff --git a/search/functions_8.js b/search/functions_8.js index 0b72f019..d0ba85b0 100644 --- a/search/functions_8.js +++ b/search/functions_8.js @@ -1,4 +1,4 @@ var searchData= [ - ['height_423',['height',['../da/d02/binary__search__tree_8c.html#ae4a66d8b0c2b0d626aea45977e358c83',1,'binary_search_tree.c']]] + ['height_432',['height',['../da/d02/binary__search__tree_8c.html#ae4a66d8b0c2b0d626aea45977e358c83',1,'binary_search_tree.c']]] ]; diff --git a/search/functions_9.js b/search/functions_9.js index 27520634..b3f4e7a9 100644 --- a/search/functions_9.js +++ b/search/functions_9.js @@ -1,17 +1,17 @@ var searchData= [ - ['inorder_424',['inOrder',['../da/d02/binary__search__tree_8c.html#a0f18adaaca5ecc410cfa16dd2a3684dc',1,'binary_search_tree.c']]], - ['inorder_5fdisplay_425',['inorder_display',['../df/d3c/threaded__binary__trees_8c.html#a4c1e06b5f0876ec9c1bd6817f3b7eda7',1,'threaded_binary_trees.c']]], - ['insert_426',['insert',['../da/d02/binary__search__tree_8c.html#a73152b9ccb4aa5cd4c1bacd4188bb2de',1,'binary_search_tree.c']]], - ['insert_5fbt_427',['insert_bt',['../df/d3c/threaded__binary__trees_8c.html#a823432888332fc9f0aa6072cff28c3bb',1,'threaded_binary_trees.c']]], - ['insertionsort_428',['insertionSort',['../db/ddf/insertion__sort_8c.html#a0d6c227641a5e0dae580b3a18df241fb',1,'insertion_sort.c']]], - ['int_5fto_5fstring_429',['int_to_string',['../dd/d53/int__to__string_8c.html#a969911f32f1c435bb2bf166574ef9ae5',1,'int_to_string.c']]], - ['is_5fabundant_430',['is_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a4f128410e6582fe26488e2316cc96e17',1,'is_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a34f4ad85151e3a43368ae67f42347f56',1,'is_abundant(unsigned long N): sol2.c']]], - ['is_5fin_431',['is_in',['../d4/d83/problem__401_2sol1_8c.html#a4441a6d27134cf3aed05727800d99456',1,'sol1.c']]], - ['is_5fleap_5fyear_432',['is_leap_year',['../dd/df0/problem__19_2sol1_8c.html#a6561b1adc8a19c092679b9874da24e2e',1,'sol1.c']]], - ['is_5fpalindromic_433',['is_palindromic',['../d0/d6c/problem__4_2sol_8c.html#adf9bea8d35848959bde5b3f277edf0c4',1,'sol.c']]], - ['is_5fprime_434',['is_prime',['../d0/d6d/problem__10_2sol1_8c.html#acc871ab6bfead702e983a7f9c412915f',1,'sol1.c']]], - ['is_5fsum_5fof_5fabundant_435',['is_sum_of_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol2.c']]], - ['ispalindrome_436',['isPalindrome',['../df/d16/palindrome_8c.html#a6320493ddee0ca4614423721c5d6f4ba',1,'palindrome.c']]], - ['isprime_437',['isprime',['../d7/dd3/problem__3_2sol1_8c.html#aa0f4796aa2e89c327f827bd55f5cb305',1,'sol1.c']]] + ['inorder_433',['inOrder',['../da/d02/binary__search__tree_8c.html#a0f18adaaca5ecc410cfa16dd2a3684dc',1,'binary_search_tree.c']]], + ['inorder_5fdisplay_434',['inorder_display',['../df/d3c/threaded__binary__trees_8c.html#a4c1e06b5f0876ec9c1bd6817f3b7eda7',1,'threaded_binary_trees.c']]], + ['insert_435',['insert',['../da/d02/binary__search__tree_8c.html#a73152b9ccb4aa5cd4c1bacd4188bb2de',1,'binary_search_tree.c']]], + ['insert_5fbt_436',['insert_bt',['../df/d3c/threaded__binary__trees_8c.html#a823432888332fc9f0aa6072cff28c3bb',1,'threaded_binary_trees.c']]], + ['insertionsort_437',['insertionSort',['../db/ddf/insertion__sort_8c.html#a0d6c227641a5e0dae580b3a18df241fb',1,'insertion_sort.c']]], + ['int_5fto_5fstring_438',['int_to_string',['../dd/d53/int__to__string_8c.html#a969911f32f1c435bb2bf166574ef9ae5',1,'int_to_string.c']]], + ['is_5fabundant_439',['is_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a4f128410e6582fe26488e2316cc96e17',1,'is_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a34f4ad85151e3a43368ae67f42347f56',1,'is_abundant(unsigned long N): sol2.c']]], + ['is_5fin_440',['is_in',['../d4/d83/problem__401_2sol1_8c.html#a4441a6d27134cf3aed05727800d99456',1,'sol1.c']]], + ['is_5fleap_5fyear_441',['is_leap_year',['../dd/df0/problem__19_2sol1_8c.html#a6561b1adc8a19c092679b9874da24e2e',1,'sol1.c']]], + ['is_5fpalindromic_442',['is_palindromic',['../d0/d6c/problem__4_2sol_8c.html#adf9bea8d35848959bde5b3f277edf0c4',1,'sol.c']]], + ['is_5fprime_443',['is_prime',['../d0/d6d/problem__10_2sol1_8c.html#acc871ab6bfead702e983a7f9c412915f',1,'sol1.c']]], + ['is_5fsum_5fof_5fabundant_444',['is_sum_of_abundant',['../d7/ddb/problem__23_2sol1_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3ab61b5a1c4f2288625d160aa0ea8478',1,'is_sum_of_abundant(unsigned long N): sol2.c']]], + ['ispalindrome_445',['isPalindrome',['../df/d16/palindrome_8c.html#a6320493ddee0ca4614423721c5d6f4ba',1,'palindrome.c']]], + ['isprime_446',['isprime',['../d7/dd3/problem__3_2sol1_8c.html#aa0f4796aa2e89c327f827bd55f5cb305',1,'sol1.c']]] ]; diff --git a/search/functions_a.js b/search/functions_a.js index aaa6b897..c3c131be 100644 --- a/search/functions_a.js +++ b/search/functions_a.js @@ -1,5 +1,5 @@ var searchData= [ - ['join_438',['join',['../df/df3/union__find_8c.html#af2f3ff6d98641f7d3be11f071c97908a',1,'union_find.c']]], - ['jump_5fsearch_439',['jump_search',['../d6/d7b/jump__search_8c.html#aff36d719e6fca6aea4377a089580c603',1,'jump_search.c']]] + ['join_447',['join',['../df/df3/union__find_8c.html#af2f3ff6d98641f7d3be11f071c97908a',1,'union_find.c']]], + ['jump_5fsearch_448',['jump_search',['../d6/d7b/jump__search_8c.html#aff36d719e6fca6aea4377a089580c603',1,'jump_search.c']]] ]; diff --git a/search/functions_b.js b/search/functions_b.js index c9c20dbc..b90c2887 100644 --- a/search/functions_b.js +++ b/search/functions_b.js @@ -1,8 +1,8 @@ var searchData= [ - ['kohonen_5fdata_5f3d_440',['kohonen_data_3d',['../d1/d6b/group__kohonen__2d.html#ga8df35f04c1762a01dcf108fa13b897d6',1,'kohonen_som_topology.c']]], - ['kohonen_5fget_5fmin_5f1d_441',['kohonen_get_min_1d',['../d0/dcb/group__kohonen__1d.html#ga4a57a413a3cef286a7da6d4666575586',1,'kohonen_som_trace.c']]], - ['kohonen_5fsom_442',['kohonen_som',['../d1/d6b/group__kohonen__2d.html#gacb42eda8af6ebd6a141a34ab00a0b710',1,'kohonen_som_topology.c']]], - ['kohonen_5fsom_5ftracer_443',['kohonen_som_tracer',['../d0/dcb/group__kohonen__1d.html#gaeaeffbff2be4d5d15b0d4f10f846abde',1,'kohonen_som_trace.c']]], - ['kohonen_5fupdate_5fweights_444',['kohonen_update_weights',['../d1/d6b/group__kohonen__2d.html#ga83abb572c60d202e100595a989dfe123',1,'kohonen_update_weights(const double *X, struct kohonen_array_3d *W, double **D, int num_out, int num_features, double alpha, int R): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gae334493a0917a24736fe5ba82aa6f81f',1,'kohonen_update_weights(double const *x, double *const *W, double *D, int num_out, int num_features, double alpha, int R): kohonen_som_trace.c']]] + ['kohonen_5fdata_5f3d_449',['kohonen_data_3d',['../d1/d6b/group__kohonen__2d.html#ga8df35f04c1762a01dcf108fa13b897d6',1,'kohonen_som_topology.c']]], + ['kohonen_5fget_5fmin_5f1d_450',['kohonen_get_min_1d',['../d0/dcb/group__kohonen__1d.html#ga4a57a413a3cef286a7da6d4666575586',1,'kohonen_som_trace.c']]], + ['kohonen_5fsom_451',['kohonen_som',['../d1/d6b/group__kohonen__2d.html#gacb42eda8af6ebd6a141a34ab00a0b710',1,'kohonen_som_topology.c']]], + ['kohonen_5fsom_5ftracer_452',['kohonen_som_tracer',['../d0/dcb/group__kohonen__1d.html#gaeaeffbff2be4d5d15b0d4f10f846abde',1,'kohonen_som_trace.c']]], + ['kohonen_5fupdate_5fweights_453',['kohonen_update_weights',['../d1/d6b/group__kohonen__2d.html#ga83abb572c60d202e100595a989dfe123',1,'kohonen_update_weights(const double *X, struct kohonen_array_3d *W, double **D, int num_out, int num_features, double alpha, int R): kohonen_som_topology.c'],['../d0/dcb/group__kohonen__1d.html#gae334493a0917a24736fe5ba82aa6f81f',1,'kohonen_update_weights(double const *x, double *const *W, double *D, int num_out, int num_features, double alpha, int R): kohonen_som_trace.c']]] ]; diff --git a/search/functions_c.js b/search/functions_c.js index 91747600..fd2ce6bb 100644 --- a/search/functions_c.js +++ b/search/functions_c.js @@ -1,6 +1,6 @@ var searchData= [ - ['lazy_5fsort_445',['lazy_sort',['../dd/d8b/problem__22_2sol1_8c.html#ae359b8a4656b164c91ef91a084c15c9d',1,'sol1.c']]], - ['lcm_446',['lcm',['../df/de7/problem__5_2sol_8c.html#ae9606f1867e9921867d6572f51377b4c',1,'sol.c']]], - ['lu_5fdecomposition_447',['lu_decomposition',['../dc/d2e/lu__decompose_8c.html#aae40b90a8efd645c749128cf8072bbb4',1,'lu_decompose.c']]] + ['lazy_5fsort_454',['lazy_sort',['../dd/d8b/problem__22_2sol1_8c.html#ae359b8a4656b164c91ef91a084c15c9d',1,'sol1.c']]], + ['lcm_455',['lcm',['../df/de7/problem__5_2sol_8c.html#ae9606f1867e9921867d6572f51377b4c',1,'sol.c']]], + ['lu_5fdecomposition_456',['lu_decomposition',['../dc/d2e/lu__decompose_8c.html#aae40b90a8efd645c749128cf8072bbb4',1,'lu_decompose.c']]] ]; diff --git a/search/functions_d.js b/search/functions_d.js index 5ff71401..939a3845 100644 --- a/search/functions_d.js +++ b/search/functions_d.js @@ -1,11 +1,11 @@ var searchData= [ - ['main_448',['main',['../dd/d93/client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): client.c'],['../d1/d20/server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): server.c'],['../da/de6/udp__client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_client.c'],['../d8/dca/udp__server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_server.c'],['../d7/dd8/c__atoi__str__to__integer_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): c_atoi_str_to_integer.c'],['../d8/d30/decimal__to__binary__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): int_to_string.c'],['../da/d02/binary__search__tree_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): threaded_binary_trees.c'],['../d7/d98/spirograph_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): spirograph.c'],['../d3/d39/hash__adler32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_adler32.c'],['../d9/dc9/hash__crc32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_crc32.c'],['../d4/de3/hash__djb2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_djb2.c'],['../d7/d0c/hash__sdbm_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_sdbm.c'],['../d0/d57/hash__xor8_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_xor8.c'],['../dd/d8c/adaline__learning_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_trace.c'],['../dc/d80/cantor__set_8c.html#abf9e6b7e6f15df4b525a2e7705ba3089',1,'main(int argc, char const *argv[]): cantor_set.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): cartesian_to_polar.c'],['../dc/d80/collatz_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): collatz.c'],['../d6/d3d/factorial__large__number_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): factorial_large_number.c'],['../d4/d99/fibonacci__fast_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): fibonacci_fast.c'],['../df/d16/palindrome_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): palindrome.c'],['../de/dac/sudoku__solver_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sudoku_solver.c'],['../df/df3/union__find_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): union_find.c'],['../da/d38/durand__kerner__roots_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): durand_kerner_roots.c'],['../dc/d2e/lu__decompose_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): lu_decompose.c'],['../dd/d08/newton__raphson__root_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): newton_raphson_root.c'],['../d4/d07/ode__forward__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_semi_implicit_euler.c'],['../d5/d23/qr__decomposition_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): qr_decomposition.c'],['../d7/d50/qr__eigen__values_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): qr_eigen_values.c'],['../dc/d47/realtime__stats_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): realtime_stats.c'],['../da/d35/problem__1_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dae/problem__1_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d6/de3/sol3_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol3.c'],['../d6/d1b/sol4_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol4.c'],['../d0/d6d/problem__10_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d9/da7/problem__10_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../d7/d1f/problem__12_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../db/d01/problem__13_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d4/dea/problem__14_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/d91/problem__15_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d6/d88/problem__16_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/df0/problem__19_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d0/d7f/so1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): so1.c'],['../db/d80/problem__20_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/d1a/problem__21_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/d8b/problem__22_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/ddb/problem__23_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol2.c'],['../d8/d32/problem__25_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d1/df9/problem__26_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d7/dd3/problem__3_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dbc/problem__3_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d0/d6c/problem__4_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d83/problem__401_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/de7/problem__5_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d7b/problem__6_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d1/d2f/problem__7_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../dc/d63/problem__8_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d2/d93/problem__8_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../df/da5/problem__9_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d8/de0/problem__9_2sol2_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol2.c'],['../df/d3b/binary__search_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): jump_search.c'],['../d3/d47/modified__binary__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): modified_binary_search.c'],['../d2/da8/bead__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): bubble_sort_recursion.c'],['../d2/d83/merge__sort_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): merge_sort.c'],['../df/d83/selection__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): selection_sort.c'],['../d6/ded/shell__sort2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): shell_sort2.c']]], - ['mat_5fmul_449',['mat_mul',['../d7/d50/qr__eigen__values_8c.html#a741477692f001a805b0fea942c9dc2b9',1,'qr_eigen_values.c']]], - ['merge_450',['merge',['../d5/d4c/group__sorting.html#ga8dc3ec66cb3350313fdb34bfd1674729',1,'merge_sort.c']]], - ['merge_5fsort_451',['merge_sort',['../d5/d4c/group__sorting.html#gab99b8a397bdd0bf2903d66c22ba4ba43',1,'merge_sort.c']]], - ['midpoint_5feuler_452',['midpoint_euler',['../d1/dc2/ode__midpoint__euler_8c.html#a148003d8b261d040c1c41e73b40af1dd',1,'ode_midpoint_euler.c']]], - ['midpoint_5feuler_5fstep_453',['midpoint_euler_step',['../d1/dc2/ode__midpoint__euler_8c.html#affe6cc2ab040b94a29e6c41782f72d51',1,'ode_midpoint_euler.c']]], - ['modifiedbinarysearch_454',['modifiedBinarySearch',['../d3/d47/modified__binary__search_8c.html#a7df9a198e30cded6229d79bef7591f8f',1,'modified_binary_search.c']]], - ['multiply_455',['multiply',['../d6/d3d/factorial__large__number_8c.html#ad398ddbd594ca69a5e6dfc894925341e',1,'factorial_large_number.c']]] + ['main_457',['main',['../dd/d93/client_8c.html#a51af30a60f9f02777c6396b8247e356f',1,'main(): client.c'],['../d1/d20/server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): server.c'],['../da/de6/udp__client_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_client.c'],['../d8/dca/udp__server_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): udp_server.c'],['../d7/dd8/c__atoi__str__to__integer_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): c_atoi_str_to_integer.c'],['../d8/d30/decimal__to__binary__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): decimal_to_binary_recursion.c'],['../dd/d53/int__to__string_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): int_to_string.c'],['../da/d02/binary__search__tree_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): threaded_binary_trees.c'],['../d7/d98/spirograph_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): spirograph.c'],['../d3/d39/hash__adler32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_adler32.c'],['../d9/dc9/hash__crc32_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_crc32.c'],['../d4/de3/hash__djb2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_djb2.c'],['../d7/d0c/hash__sdbm_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_sdbm.c'],['../d0/d57/hash__xor8_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): hash_xor8.c'],['../dd/d8c/adaline__learning_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): adaline_learning.c'],['../d2/df6/kohonen__som__topology_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_topology.c'],['../d0/d46/kohonen__som__trace_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): kohonen_som_trace.c'],['../dc/d80/cantor__set_8c.html#abf9e6b7e6f15df4b525a2e7705ba3089',1,'main(int argc, char const *argv[]): cantor_set.c'],['../d6/d2e/cartesian__to__polar_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): cartesian_to_polar.c'],['../dc/d80/collatz_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): collatz.c'],['../d6/d3d/factorial__large__number_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): factorial_large_number.c'],['../d4/d99/fibonacci__fast_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): fibonacci_fast.c'],['../df/d16/palindrome_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): palindrome.c'],['../de/dac/sudoku__solver_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sudoku_solver.c'],['../df/df3/union__find_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): union_find.c'],['../da/d38/durand__kerner__roots_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): durand_kerner_roots.c'],['../dc/d2e/lu__decompose_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): lu_decompose.c'],['../dd/d08/newton__raphson__root_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): newton_raphson_root.c'],['../d4/d07/ode__forward__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_forward_euler.c'],['../d1/dc2/ode__midpoint__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_midpoint_euler.c'],['../d4/d99/ode__semi__implicit__euler_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): ode_semi_implicit_euler.c'],['../d5/d23/qr__decomposition_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): qr_decomposition.c'],['../d7/d50/qr__eigen__values_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): qr_eigen_values.c'],['../dc/d47/realtime__stats_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): realtime_stats.c'],['../da/d35/problem__1_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dae/problem__1_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d6/de3/sol3_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol3.c'],['../d6/d1b/sol4_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol4.c'],['../d0/d6d/problem__10_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d9/da7/problem__10_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../d7/d1f/problem__12_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../db/d01/problem__13_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d4/dea/problem__14_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/d91/problem__15_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d6/d88/problem__16_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/df0/problem__19_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d0/d7f/so1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): so1.c'],['../db/d80/problem__20_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/d1a/problem__21_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../dd/d8b/problem__22_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d7/ddb/problem__23_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../d4/dbd/problem__23_2sol2_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol2.c'],['../d8/d32/problem__25_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d1/df9/problem__26_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d7/dd3/problem__3_2sol1_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol1.c'],['../d2/dbc/problem__3_2sol2_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): sol2.c'],['../d0/d6c/problem__4_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d83/problem__401_2sol1_8c.html#a3c04138a5bfe5d72780bb7e82a18e627',1,'main(int argc, char **argv): sol1.c'],['../df/de7/problem__5_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d4/d7b/problem__6_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../d1/d2f/problem__7_2sol_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol.c'],['../dc/d63/problem__8_2sol1_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol1.c'],['../d2/d93/problem__8_2sol2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): sol2.c'],['../df/da5/problem__9_2sol1_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol1.c'],['../d8/de0/problem__9_2sol2_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): sol2.c'],['../df/d3b/binary__search_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): binary_search.c'],['../d6/d7b/jump__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): jump_search.c'],['../d3/d47/modified__binary__search_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): modified_binary_search.c'],['../d2/da8/bead__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bead_sort.c'],['../dd/de4/bubble__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): bubble_sort.c'],['../d5/d38/bubble__sort__recursion_8c.html#ae66f6b31b5ad750f1fe042a706a4e3d4',1,'main(): bubble_sort_recursion.c'],['../d2/d83/merge__sort_8c.html#a840291bc02cba5474a4cb46a9b9566fe',1,'main(void): merge_sort.c'],['../df/d83/selection__sort_8c.html#ac0f2228420376f4db7e1274f2b41667c',1,'main(int argc, const char *argv[]): selection_sort.c'],['../d6/ded/shell__sort2_8c.html#a0ddf1224851353fc92bfbff6f499fa97',1,'main(int argc, char *argv[]): shell_sort2.c']]], + ['mat_5fmul_458',['mat_mul',['../d7/d50/qr__eigen__values_8c.html#a741477692f001a805b0fea942c9dc2b9',1,'qr_eigen_values.c']]], + ['merge_459',['merge',['../d5/d4c/group__sorting.html#ga8dc3ec66cb3350313fdb34bfd1674729',1,'merge_sort.c']]], + ['merge_5fsort_460',['merge_sort',['../d5/d4c/group__sorting.html#gab99b8a397bdd0bf2903d66c22ba4ba43',1,'merge_sort.c']]], + ['midpoint_5feuler_461',['midpoint_euler',['../d1/dc2/ode__midpoint__euler_8c.html#a148003d8b261d040c1c41e73b40af1dd',1,'ode_midpoint_euler.c']]], + ['midpoint_5feuler_5fstep_462',['midpoint_euler_step',['../d1/dc2/ode__midpoint__euler_8c.html#affe6cc2ab040b94a29e6c41782f72d51',1,'ode_midpoint_euler.c']]], + ['modifiedbinarysearch_463',['modifiedBinarySearch',['../d3/d47/modified__binary__search_8c.html#a7df9a198e30cded6229d79bef7591f8f',1,'modified_binary_search.c']]], + ['multiply_464',['multiply',['../d6/d3d/factorial__large__number_8c.html#ad398ddbd594ca69a5e6dfc894925341e',1,'factorial_large_number.c']]] ]; diff --git a/search/functions_e.js b/search/functions_e.js index ad633c2d..c7d8158c 100644 --- a/search/functions_e.js +++ b/search/functions_e.js @@ -1,7 +1,7 @@ var searchData= [ - ['new_5fadaline_456',['new_adaline',['../da/d2a/group__adaline.html#gacd88962c5f6341e43cbc69b4a7d3485b',1,'adaline_learning.c']]], - ['new_5fnumber_457',['new_number',['../d6/d3d/factorial__large__number_8c.html#ad8101f58545bd891ae8b6e11caadd7eb',1,'factorial_large_number.c']]], - ['newnode_458',['newNode',['../da/d02/binary__search__tree_8c.html#ac73c73be92dbbeeaad942c0103b9540d',1,'binary_search_tree.c']]], - ['number_5fof_5fpaths_459',['number_of_paths',['../d7/d91/problem__15_2sol1_8c.html#a4650d1d3897633d84253f93433f601d6',1,'sol1.c']]] + ['new_5fadaline_465',['new_adaline',['../da/d2a/group__adaline.html#gacd88962c5f6341e43cbc69b4a7d3485b',1,'adaline_learning.c']]], + ['new_5fnumber_466',['new_number',['../d6/d3d/factorial__large__number_8c.html#ad8101f58545bd891ae8b6e11caadd7eb',1,'factorial_large_number.c']]], + ['newnode_467',['newNode',['../da/d02/binary__search__tree_8c.html#ac73c73be92dbbeeaad942c0103b9540d',1,'binary_search_tree.c']]], + ['number_5fof_5fpaths_468',['number_of_paths',['../d7/d91/problem__15_2sol1_8c.html#a4650d1d3897633d84253f93433f601d6',1,'sol1.c']]] ]; diff --git a/search/functions_f.js b/search/functions_f.js index 050bdf6e..7fc4c8be 100644 --- a/search/functions_f.js +++ b/search/functions_f.js @@ -1,7 +1,7 @@ var searchData= [ - ['ok_460',['OK',['../d5/df4/group__sudoku.html#ga3a0ec150ac9d0cb6b28279d36d95d72f',1,'sudoku_solver.c']]], - ['okbox_461',['OKbox',['../d5/df4/group__sudoku.html#ga1cd43df3f4187845ce186042fe53e6f1',1,'sudoku_solver.c']]], - ['okcol_462',['OKcol',['../d5/df4/group__sudoku.html#ga6503128d4f5ce0a0826f72f73f9e0b2a',1,'sudoku_solver.c']]], - ['okrow_463',['OKrow',['../d5/df4/group__sudoku.html#ga85d25d3b40017436f264a103685e4c55',1,'sudoku_solver.c']]] + ['ok_469',['OK',['../d5/df4/group__sudoku.html#ga3a0ec150ac9d0cb6b28279d36d95d72f',1,'sudoku_solver.c']]], + ['okbox_470',['OKbox',['../d5/df4/group__sudoku.html#ga1cd43df3f4187845ce186042fe53e6f1',1,'sudoku_solver.c']]], + ['okcol_471',['OKcol',['../d5/df4/group__sudoku.html#ga6503128d4f5ce0a0826f72f73f9e0b2a',1,'sudoku_solver.c']]], + ['okrow_472',['OKrow',['../d5/df4/group__sudoku.html#ga85d25d3b40017436f264a103685e4c55',1,'sudoku_solver.c']]] ]; diff --git a/search/groups_0.js b/search/groups_0.js index 2cd879c9..5aee390c 100644 --- a/search/groups_0.js +++ b/search/groups_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['adaline_20learning_20algorithm_562',['Adaline learning algorithm',['../da/d2a/group__adaline.html',1,'']]] + ['adaline_20learning_20algorithm_575',['Adaline learning algorithm',['../da/d2a/group__adaline.html',1,'']]] ]; diff --git a/search/groups_1.js b/search/groups_1.js index a0762aa0..f45c502a 100644 --- a/search/groups_1.js +++ b/search/groups_1.js @@ -1,4 +1,4 @@ var searchData= [ - ['hash_20algorithms_563',['Hash algorithms',['../d7/d3b/group__hash.html',1,'']]] + ['hash_20algorithms_576',['Hash algorithms',['../d7/d3b/group__hash.html',1,'']]] ]; diff --git a/search/groups_2.js b/search/groups_2.js index 433ee062..be789e48 100644 --- a/search/groups_2.js +++ b/search/groups_2.js @@ -1,5 +1,6 @@ var searchData= [ - ['kohonen_20som_20trace_2fchain_20algorithm_564',['Kohonen SOM trace/chain algorithm',['../d0/dcb/group__kohonen__1d.html',1,'']]], - ['kohonen_20som_20topology_20algorithm_565',['Kohonen SOM topology algorithm',['../d1/d6b/group__kohonen__2d.html',1,'']]] + ['k_2dmeans_20clustering_20algorithm_577',['K-Means Clustering Algorithm',['../d8/d71/group__k__means.html',1,'']]], + ['kohonen_20som_20trace_2fchain_20algorithm_578',['Kohonen SOM trace/chain algorithm',['../d0/dcb/group__kohonen__1d.html',1,'']]], + ['kohonen_20som_20topology_20algorithm_579',['Kohonen SOM topology algorithm',['../d1/d6b/group__kohonen__2d.html',1,'']]] ]; diff --git a/search/groups_3.js b/search/groups_3.js index 0597a014..a8f7edc8 100644 --- a/search/groups_3.js +++ b/search/groups_3.js @@ -1,4 +1,4 @@ var searchData= [ - ['machine_20learning_20algorithms_566',['Machine learning algorithms',['../d9/d66/group__machine__learning.html',1,'']]] + ['machine_20learning_20algorithms_580',['Machine learning algorithms',['../d9/d66/group__machine__learning.html',1,'']]] ]; diff --git a/search/groups_4.js b/search/groups_4.js index bfac753a..8ffb791d 100644 --- a/search/groups_4.js +++ b/search/groups_4.js @@ -1,5 +1,5 @@ var searchData= [ - ['sorting_20algorithms_567',['Sorting algorithms',['../d5/d4c/group__sorting.html',1,'']]], - ['sudoku_20solver_568',['Sudoku solver',['../d5/df4/group__sudoku.html',1,'']]] + ['sorting_20algorithms_581',['Sorting algorithms',['../d5/d4c/group__sorting.html',1,'']]], + ['sudoku_20solver_582',['Sudoku solver',['../d5/df4/group__sudoku.html',1,'']]] ]; diff --git a/search/pages_0.js b/search/pages_0.js index 687aba2d..95a70599 100644 --- a/search/pages_0.js +++ b/search/pages_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['array_569',['Array',['../d9/d41/md_data_structures_array__r_e_a_d_m_e.html',1,'']]] + ['array_583',['Array',['../d9/d41/md_data_structures_array__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_1.js b/search/pages_1.js index 66d715dc..6b8124b0 100644 --- a/search/pages_1.js +++ b/search/pages_1.js @@ -1,4 +1,4 @@ var searchData= [ - ['code_20style_20convention_570',['Code style convention',['../dc/d64/md__coding_guidelines.html',1,'']]] + ['code_20style_20convention_584',['Code style convention',['../dc/d64/md__coding_guidelines.html',1,'']]] ]; diff --git a/search/pages_2.js b/search/pages_2.js index b943ac3f..5810aaec 100644 --- a/search/pages_2.js +++ b/search/pages_2.js @@ -1,4 +1,4 @@ var searchData= [ - ['dictionary_571',['Dictionary',['../de/d20/md_data_structures_dictionary__r_e_a_d_m_e.html',1,'']]] + ['dictionary_585',['Dictionary',['../de/d20/md_data_structures_dictionary__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_3.js b/search/pages_3.js index 3fe3e1b9..696cac1d 100644 --- a/search/pages_3.js +++ b/search/pages_3.js @@ -1,4 +1,4 @@ var searchData= [ - ['hash_20algorithms_572',['Hash algorithms',['../d4/dcb/md_hash__r_e_a_d_m_e.html',1,'']]] + ['hash_20algorithms_586',['Hash algorithms',['../d4/dcb/md_hash__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_4.js b/search/pages_4.js index 2cebf6fe..5e7ae875 100644 --- a/search/pages_4.js +++ b/search/pages_4.js @@ -1,5 +1,5 @@ var searchData= [ - ['list_20of_20all_20files_573',['List of all files',['../d5/d88/md__d_i_r_e_c_t_o_r_y.html',1,'']]], - ['leetcode_574',['LeetCode',['../df/d58/md_leetcode__r_e_a_d_m_e.html',1,'']]] + ['list_20of_20all_20files_587',['List of all files',['../d5/d88/md__d_i_r_e_c_t_o_r_y.html',1,'']]], + ['leetcode_588',['LeetCode',['../df/d58/md_leetcode__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_5.js b/search/pages_5.js index d4a239f1..20a88dbb 100644 --- a/search/pages_5.js +++ b/search/pages_5.js @@ -1,4 +1,4 @@ var searchData= [ - ['projecteuler_575',['ProjectEuler',['../d8/d81/md_project_euler__r_e_a_d_m_e.html',1,'']]] + ['projecteuler_589',['ProjectEuler',['../d8/d81/md_project_euler__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_6.js b/search/pages_6.js index cd4abfa2..67e42c48 100644 --- a/search/pages_6.js +++ b/search/pages_6.js @@ -1,5 +1,5 @@ var searchData= [ - ['simple_20generic_20stack_576',['Simple generic Stack',['../d1/d12/md_data_structures_stack__r_e_a_d_m_e.html',1,'']]], - ['sample_20solutions_20for_20_3ca_20href_3d_22http_3a_2f_2fexercism_2eio_2f_22_3eexercism_2eio_3c_2fa_3e_577',['Sample solutions for <a href="http://exercism.io/">exercism.io</a>',['../d7/db5/md_exercism__r_e_a_d_m_e.html',1,'']]] + ['simple_20generic_20stack_590',['Simple generic Stack',['../d1/d12/md_data_structures_stack__r_e_a_d_m_e.html',1,'']]], + ['sample_20solutions_20for_20_3ca_20href_3d_22http_3a_2f_2fexercism_2eio_2f_22_3eexercism_2eio_3c_2fa_3e_591',['Sample solutions for <a href="http://exercism.io/">exercism.io</a>',['../d7/db5/md_exercism__r_e_a_d_m_e.html',1,'']]] ]; diff --git a/search/pages_7.js b/search/pages_7.js index 648c4ef8..4c9e21da 100644 --- a/search/pages_7.js +++ b/search/pages_7.js @@ -1,4 +1,4 @@ var searchData= [ - ['the_20algorithms_20_2d_20c_578',['The Algorithms - C',['../index.html',1,'']]] + ['the_20algorithms_20_2d_20c_592',['The Algorithms - C',['../index.html',1,'']]] ]; diff --git a/search/searchdata.js b/search/searchdata.js index db304d66..b5bf8430 100644 --- a/search/searchdata.js +++ b/search/searchdata.js @@ -1,10 +1,10 @@ var indexSectionsWithContent = { - 0: "_abcdefghijklmnopqrstuvwx", - 1: "_abcdeghklmnpqstw", + 0: "_abcdefghijklmnopqrstuvwxy", + 1: "_abcdeghklmnopqstw", 2: "abcdfhijklmnopqrstu", 3: "_abcdefghijklmnopqrstvx", - 4: "adelnprsvw", + 4: "acdeglnprsvwxy", 5: "bcln", 6: "_aelmops", 7: "ahkms", diff --git a/search/typedefs_0.js b/search/typedefs_0.js index b4e7d3a3..479364f4 100644 --- a/search/typedefs_0.js +++ b/search/typedefs_0.js @@ -1,4 +1,4 @@ var searchData= [ - ['big_5fint_540',['big_int',['../db/d80/problem__20_2sol1_8c.html#a62cbbd106aad52daadb9403a07d0da32',1,'sol1.c']]] + ['big_5fint_553',['big_int',['../db/d80/problem__20_2sol1_8c.html#a62cbbd106aad52daadb9403a07d0da32',1,'sol1.c']]] ]; diff --git a/search/typedefs_1.js b/search/typedefs_1.js index 2bcf7f03..f9b9ed20 100644 --- a/search/typedefs_1.js +++ b/search/typedefs_1.js @@ -1,4 +1,4 @@ var searchData= [ - ['cantorset_541',['CantorSet',['../dc/d80/cantor__set_8c.html#a2b95c356aff8a282eaad255008fa5a94',1,'cantor_set.c']]] + ['cantorset_554',['CantorSet',['../dc/d80/cantor__set_8c.html#a2b95c356aff8a282eaad255008fa5a94',1,'cantor_set.c']]] ]; diff --git a/search/typedefs_2.js b/search/typedefs_2.js index b42d3915..01e38a7f 100644 --- a/search/typedefs_2.js +++ b/search/typedefs_2.js @@ -1,4 +1,4 @@ var searchData= [ - ['large_5fnum_542',['large_num',['../d6/d3d/factorial__large__number_8c.html#ab54882961780c41a4929a6d390f6522d',1,'factorial_large_number.c']]] + ['large_5fnum_555',['large_num',['../d6/d3d/factorial__large__number_8c.html#ab54882961780c41a4929a6d390f6522d',1,'factorial_large_number.c']]] ]; diff --git a/search/typedefs_3.js b/search/typedefs_3.js index 9fc45c1d..a53cdf6c 100644 --- a/search/typedefs_3.js +++ b/search/typedefs_3.js @@ -1,4 +1,4 @@ var searchData= [ - ['node_543',['node',['../da/d02/binary__search__tree_8c.html#af4aeda155dbe167f1c1cf38cb65bf324',1,'node(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ad8ecdcce462dd8e170ae1f164935aaa6',1,'node(): threaded_binary_trees.c']]] + ['node_556',['node',['../da/d02/binary__search__tree_8c.html#af4aeda155dbe167f1c1cf38cb65bf324',1,'node(): binary_search_tree.c'],['../df/d3c/threaded__binary__trees_8c.html#ad8ecdcce462dd8e170ae1f164935aaa6',1,'node(): threaded_binary_trees.c']]] ]; diff --git a/search/variables_0.js b/search/variables_0.js index 0516b904..ddba677f 100644 --- a/search/variables_0.js +++ b/search/variables_0.js @@ -1,5 +1,5 @@ var searchData= [ - ['a_517',['a',['../dc/d18/structsudoku.html#a507f788b793d4d3d6f6a70415be84ded',1,'sudoku']]], - ['abundant_5fflags_518',['abundant_flags',['../d4/dbd/problem__23_2sol2_8c.html#af920a16d6ef69dd604b283f427892e06',1,'sol2.c']]] + ['a_526',['a',['../dc/d18/structsudoku.html#a507f788b793d4d3d6f6a70415be84ded',1,'sudoku']]], + ['abundant_5fflags_527',['abundant_flags',['../d4/dbd/problem__23_2sol2_8c.html#af920a16d6ef69dd604b283f427892e06',1,'sol2.c']]] ]; diff --git a/search/variables_1.js b/search/variables_1.js index 8a9e31c3..955320b9 100644 --- a/search/variables_1.js +++ b/search/variables_1.js @@ -1,8 +1,4 @@ var searchData= [ - ['data_519',['data',['../d5/da1/structnode.html#a2d890bb9f6af0ffd73fe79b21124c2a2',1,'node::data()'],['../db/d8b/struct_node.html#a87c003c9f600e3fc58e6e90835f0b605',1,'Node::data()'],['../d8/db8/structkohonen__array__3d.html#ad546baa2e81c6196d5f1dc0fe2e5bd59',1,'kohonen_array_3d::data()']]], - ['digits_520',['digits',['../d3/d5a/struct__large__num.html#afaf353a072cf050ac86ac6e39868bcc9',1,'_large_num']]], - ['dim1_521',['dim1',['../d8/db8/structkohonen__array__3d.html#a16720581653fa9a34d1029e7229a7377',1,'kohonen_array_3d']]], - ['dim2_522',['dim2',['../d8/db8/structkohonen__array__3d.html#a888d7e007b38c91c7933e12a9566af1d',1,'kohonen_array_3d']]], - ['dim3_523',['dim3',['../d8/db8/structkohonen__array__3d.html#a160f14830bdfbbf9f422f382ee754dbf',1,'kohonen_array_3d']]] + ['count_528',['count',['../d1/d99/structcluster.html#aaacf0562ee2d9e8866c66ddaa6527c2b',1,'cluster']]] ]; diff --git a/search/variables_2.js b/search/variables_2.js index 296c21dc..f8a1a8f4 100644 --- a/search/variables_2.js +++ b/search/variables_2.js @@ -1,5 +1,8 @@ var searchData= [ - ['end_524',['end',['../d9/dd7/struct__cantor__set.html#acfc25ab716a3c79be8a5a4cab94e8def',1,'_cantor_set']]], - ['eta_525',['eta',['../d2/daa/structadaline.html#a85dbd7cce6195d11ebb388220b96bde2',1,'adaline']]] + ['data_529',['data',['../d5/da1/structnode.html#a2d890bb9f6af0ffd73fe79b21124c2a2',1,'node::data()'],['../db/d8b/struct_node.html#a87c003c9f600e3fc58e6e90835f0b605',1,'Node::data()'],['../d8/db8/structkohonen__array__3d.html#ad546baa2e81c6196d5f1dc0fe2e5bd59',1,'kohonen_array_3d::data()']]], + ['digits_530',['digits',['../d3/d5a/struct__large__num.html#afaf353a072cf050ac86ac6e39868bcc9',1,'_large_num']]], + ['dim1_531',['dim1',['../d8/db8/structkohonen__array__3d.html#a16720581653fa9a34d1029e7229a7377',1,'kohonen_array_3d']]], + ['dim2_532',['dim2',['../d8/db8/structkohonen__array__3d.html#a888d7e007b38c91c7933e12a9566af1d',1,'kohonen_array_3d']]], + ['dim3_533',['dim3',['../d8/db8/structkohonen__array__3d.html#a160f14830bdfbbf9f422f382ee754dbf',1,'kohonen_array_3d']]] ]; diff --git a/search/variables_3.js b/search/variables_3.js index fabe717c..40a87a3f 100644 --- a/search/variables_3.js +++ b/search/variables_3.js @@ -1,5 +1,5 @@ var searchData= [ - ['left_526',['left',['../d5/da1/structnode.html#af7109e6ffd82cbbb705e486fd0ce92f0',1,'node']]], - ['llink_527',['llink',['../db/d8b/struct_node.html#a60b73f452505cef98795d2c8de3e72ef',1,'Node']]] + ['end_534',['end',['../d9/dd7/struct__cantor__set.html#acfc25ab716a3c79be8a5a4cab94e8def',1,'_cantor_set']]], + ['eta_535',['eta',['../d2/daa/structadaline.html#a85dbd7cce6195d11ebb388220b96bde2',1,'adaline']]] ]; diff --git a/search/variables_4.js b/search/variables_4.js index f0c2d9ad..90a6279b 100644 --- a/search/variables_4.js +++ b/search/variables_4.js @@ -1,9 +1,4 @@ var searchData= [ - ['n_528',['N',['../dc/d18/structsudoku.html#a160365012280c3e10f1b31e914e8f129',1,'sudoku']]], - ['n2_529',['N2',['../dc/d18/structsudoku.html#a0f01e2782e82306e6fab9a8578006f56',1,'sudoku']]], - ['next_530',['next',['../d9/dd7/struct__cantor__set.html#a2f7f9f19125725d3e5673fdb4ac8cfb1',1,'_cantor_set']]], - ['next_5fdigit_531',['next_digit',['../dc/d77/struct__big__int.html#a187538b984c86d7cfdb13e297e7f3564',1,'_big_int']]], - ['num_5fdigits_532',['num_digits',['../d3/d5a/struct__large__num.html#a3fd11c0b413bbabfb8737d4ae73e5aa0',1,'_large_num']]], - ['num_5fweights_533',['num_weights',['../d2/daa/structadaline.html#a53314e737a0a5ff4552a03bcc9dafbc1',1,'adaline']]] + ['group_536',['group',['../d1/d5e/structobservation.html#a2db8ace685c08aa7b52f5a28b0843aab',1,'observation']]] ]; diff --git a/search/variables_5.js b/search/variables_5.js index d5bbd75f..fac1f0e9 100644 --- a/search/variables_5.js +++ b/search/variables_5.js @@ -1,4 +1,5 @@ var searchData= [ - ['prev_5fdigit_534',['prev_digit',['../dc/d77/struct__big__int.html#ad8405989a924410942b39ec0e9fef30b',1,'_big_int']]] + ['left_537',['left',['../d5/da1/structnode.html#af7109e6ffd82cbbb705e486fd0ce92f0',1,'node']]], + ['llink_538',['llink',['../db/d8b/struct_node.html#a60b73f452505cef98795d2c8de3e72ef',1,'Node']]] ]; diff --git a/search/variables_6.js b/search/variables_6.js index 2cb230b5..33e8264b 100644 --- a/search/variables_6.js +++ b/search/variables_6.js @@ -1,5 +1,9 @@ var searchData= [ - ['right_535',['right',['../d5/da1/structnode.html#a51e160f22dc6064bac4a4f9f1d931c2c',1,'node']]], - ['rlink_536',['rlink',['../db/d8b/struct_node.html#a0ed3c7305b43527f0f237bbfd438b8f7',1,'Node']]] + ['n_539',['N',['../dc/d18/structsudoku.html#a160365012280c3e10f1b31e914e8f129',1,'sudoku']]], + ['n2_540',['N2',['../dc/d18/structsudoku.html#a0f01e2782e82306e6fab9a8578006f56',1,'sudoku']]], + ['next_541',['next',['../d9/dd7/struct__cantor__set.html#a2f7f9f19125725d3e5673fdb4ac8cfb1',1,'_cantor_set']]], + ['next_5fdigit_542',['next_digit',['../dc/d77/struct__big__int.html#a187538b984c86d7cfdb13e297e7f3564',1,'_big_int']]], + ['num_5fdigits_543',['num_digits',['../d3/d5a/struct__large__num.html#a3fd11c0b413bbabfb8737d4ae73e5aa0',1,'_large_num']]], + ['num_5fweights_544',['num_weights',['../d2/daa/structadaline.html#a53314e737a0a5ff4552a03bcc9dafbc1',1,'adaline']]] ]; diff --git a/search/variables_7.js b/search/variables_7.js index 3eacebfe..d7050767 100644 --- a/search/variables_7.js +++ b/search/variables_7.js @@ -1,4 +1,4 @@ var searchData= [ - ['start_537',['start',['../d9/dd7/struct__cantor__set.html#abd2176c3cc3a1d85d15bbeaace35fa03',1,'_cantor_set']]] + ['prev_5fdigit_545',['prev_digit',['../dc/d77/struct__big__int.html#ad8405989a924410942b39ec0e9fef30b',1,'_big_int']]] ]; diff --git a/search/variables_8.js b/search/variables_8.js index b86c5503..b8fbbf6c 100644 --- a/search/variables_8.js +++ b/search/variables_8.js @@ -1,4 +1,5 @@ var searchData= [ - ['value_538',['value',['../dc/d77/struct__big__int.html#a273ee73fd755f2a99512cca5f0e09008',1,'_big_int']]] + ['right_546',['right',['../d5/da1/structnode.html#a51e160f22dc6064bac4a4f9f1d931c2c',1,'node']]], + ['rlink_547',['rlink',['../db/d8b/struct_node.html#a0ed3c7305b43527f0f237bbfd438b8f7',1,'Node']]] ]; diff --git a/search/variables_9.js b/search/variables_9.js index e38c21d7..d84523b2 100644 --- a/search/variables_9.js +++ b/search/variables_9.js @@ -1,4 +1,4 @@ var searchData= [ - ['weights_539',['weights',['../d2/daa/structadaline.html#a32e58c03fd9258709eae6138ad0ec657',1,'adaline']]] + ['start_548',['start',['../d9/dd7/struct__cantor__set.html#abd2176c3cc3a1d85d15bbeaace35fa03',1,'_cantor_set']]] ]; diff --git a/search/variables_a.js b/search/variables_a.js index 1658cab3..fbdf485b 100644 --- a/search/variables_a.js +++ b/search/variables_a.js @@ -1,4 +1,4 @@ var searchData= [ - ['weights_543',['weights',['../d2/daa/structadaline.html#a32e58c03fd9258709eae6138ad0ec657',1,'adaline']]] + ['value_549',['value',['../dc/d77/struct__big__int.html#a273ee73fd755f2a99512cca5f0e09008',1,'_big_int']]] ]; diff --git a/search/variables_b.html b/search/variables_b.html new file mode 100644 index 00000000..e5b2fd95 --- /dev/null +++ b/search/variables_b.html @@ -0,0 +1,36 @@ + +Loading...+ + +Searching...+No Matches+ ++ + + + + + + + ++ + diff --git a/search/variables_b.js b/search/variables_b.js new file mode 100644 index 00000000..a6ac2b60 --- /dev/null +++ b/search/variables_b.js @@ -0,0 +1,4 @@ +var searchData= +[ + ['weights_550',['weights',['../d2/daa/structadaline.html#a32e58c03fd9258709eae6138ad0ec657',1,'adaline']]] +]; diff --git a/search/variables_c.html b/search/variables_c.html new file mode 100644 index 00000000..f3e99891 --- /dev/null +++ b/search/variables_c.html @@ -0,0 +1,36 @@ + +Loading...+ + +Searching...+No Matches+ ++ + + + + + + + ++ + diff --git a/search/variables_c.js b/search/variables_c.js new file mode 100644 index 00000000..82e0d9b1 --- /dev/null +++ b/search/variables_c.js @@ -0,0 +1,4 @@ +var searchData= +[ + ['x_551',['x',['../d1/d5e/structobservation.html#a04f3dcfd59dd91353395e35c9831fade',1,'observation::x()'],['../d1/d99/structcluster.html#a13278ef636c1d9bd9ce8fad736f4c570',1,'cluster::x()']]] +]; diff --git a/search/variables_d.html b/search/variables_d.html new file mode 100644 index 00000000..478ae0ed --- /dev/null +++ b/search/variables_d.html @@ -0,0 +1,36 @@ + +Loading...+ + +Searching...+No Matches+ ++ + + + + + + + ++ + diff --git a/search/variables_d.js b/search/variables_d.js new file mode 100644 index 00000000..c7c4e557 --- /dev/null +++ b/search/variables_d.js @@ -0,0 +1,4 @@ +var searchData= +[ + ['y_552',['y',['../d1/d5e/structobservation.html#ab6be1fa7024b2d5f3a30d6c6b70efdd7',1,'observation::y()'],['../d1/d99/structcluster.html#a10fa7010c12d0f03a422d68321495479',1,'cluster::y()']]] +];Loading...+ + +Searching...+No Matches+ +
- test()
-: decimal_to_binary_recursion.c
+: decimal_to_binary_recursion.c
, int_to_string.c
, cartesian_to_polar.c
, bubble_sort_recursion.c
diff --git a/modules.html b/modules.html
index 5128d515..12bb5d13 100644
--- a/modules.html
+++ b/modules.html
@@ -99,10 +99,11 @@ $(document).ready(function(){initNavTree('modules.html',''); initResizable(); })
- main()
-: client.c
+: client.c
, server.c
, udp_server.c
, binary_search_tree.c
diff --git a/globals_t.html b/globals_t.html
index 2c73b4e5..de6bb580 100644
--- a/globals_t.html
+++ b/globals_t.html
@@ -94,7 +94,7 @@ $(document).ready(function(){initNavTree('globals_t.html',''); initResizable();
- test()
-: decimal_to_binary_recursion.c
+: decimal_to_binary_recursion.c
, int_to_string.c
, cartesian_to_polar.c
, bubble_sort_recursion.c
diff --git a/globals_m.html b/globals_m.html
index 6198348d..3a78d7f1 100644
--- a/globals_m.html
+++ b/globals_m.html
@@ -94,7 +94,7 @@ $(document).ready(function(){initNavTree('globals_m.html',''); initResizable();